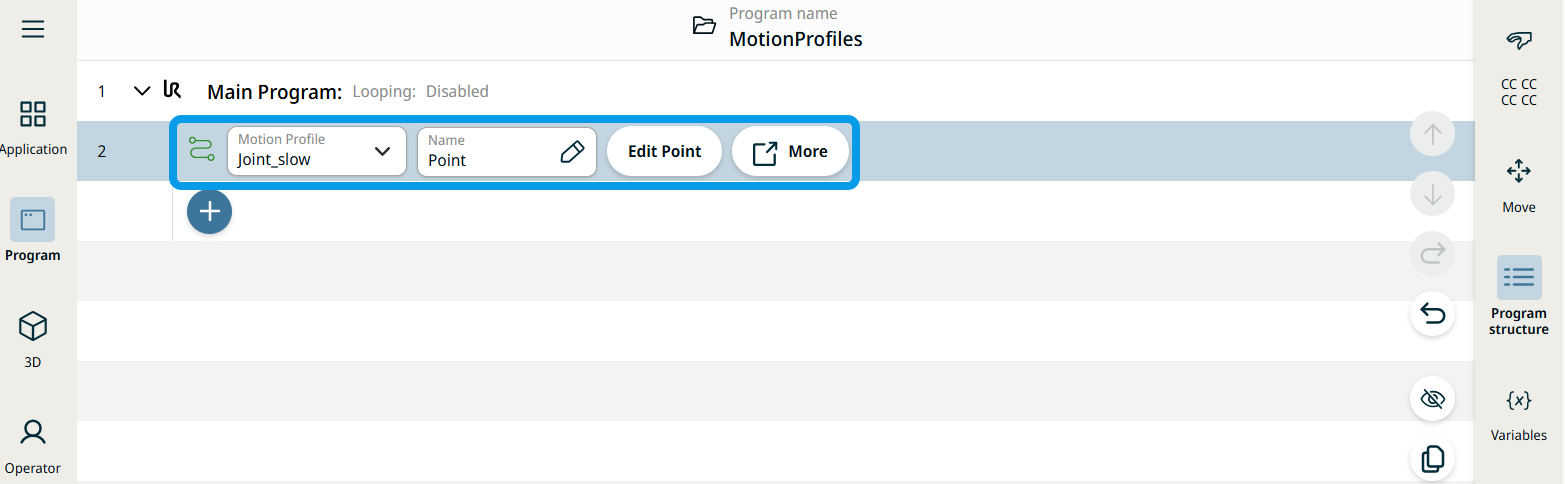
Joint Move
| Beschreibung |
The Joint Move works in a similar way to Move to command, but it supports Motion Profiles. The command creates a movement from point A to point B that is optimal for the robot. Die Bewegung ist vielleicht keine direkte Linie zwischen A und B, ist allerdings optimal für die Start- und Endposition der Gelenke. Joint Move makes movements that are calculated in the robot arm joint space. Gelenke werden so gesteuert, dass deren Bewegungen zeitgleich enden. Diese Bewegungsart sorgt für eine gekrümmte Bahn, der das Werkzeug folgt.
|
|
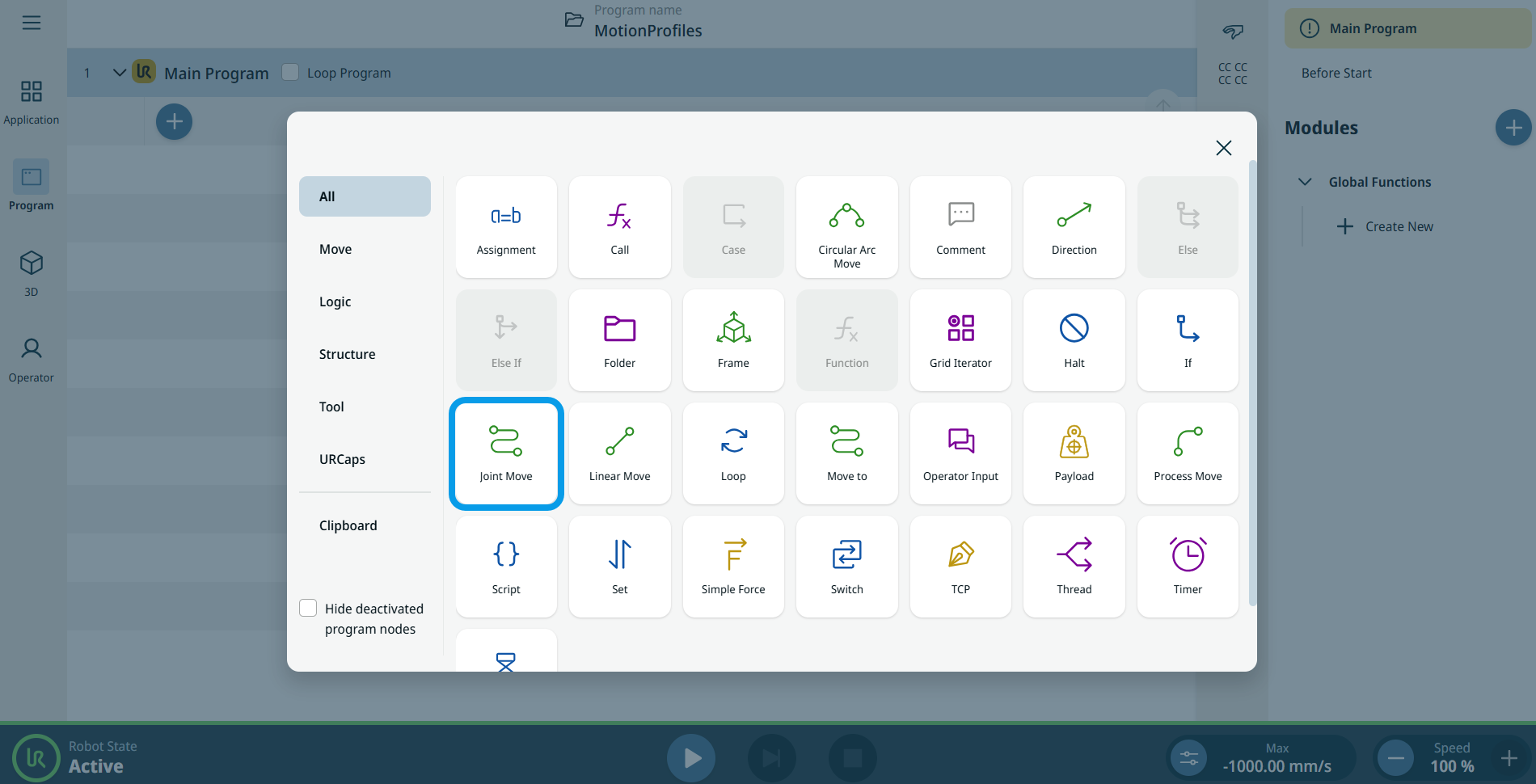
To access Joint Move command |
|
|
|
|
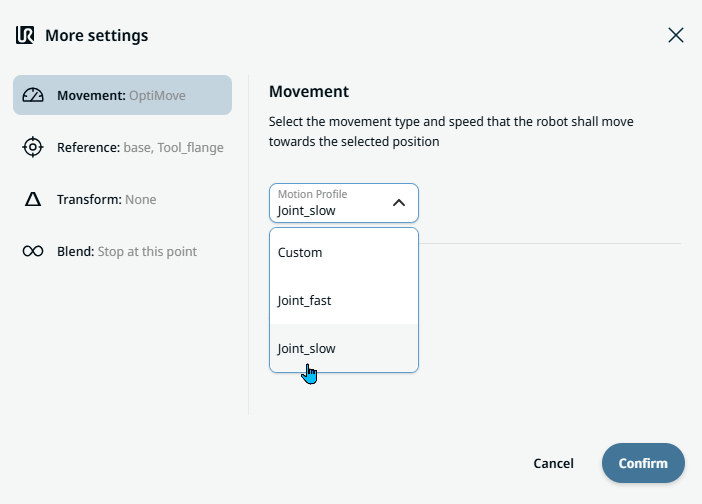
| Movement setting |
|
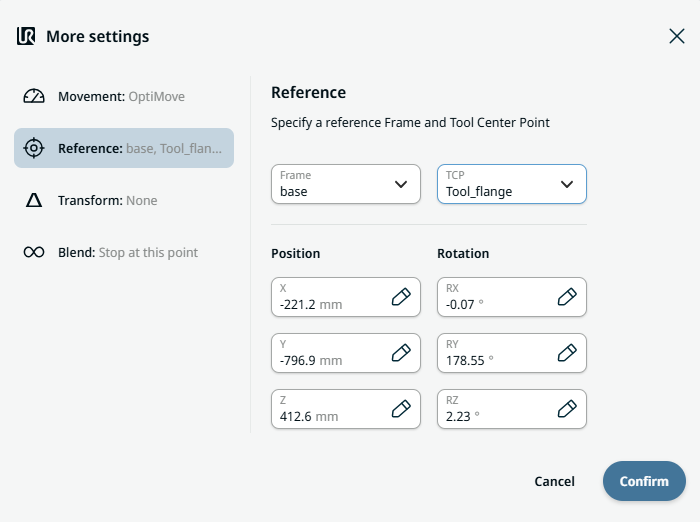
| Reference setting |
|
| Transform setting |
|
|
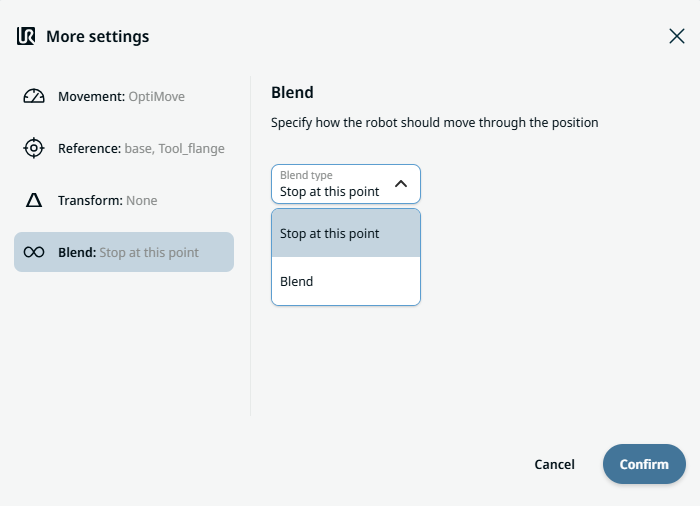
Blend setting |
|