Singularität
| Beschreibung |
Eine Singularität ist eine Pose, die die Bewegung und die Fähigkeit, den Roboter zu positionieren, einschränkt. Der Roboterarm kann seine Bewegung stoppen oder sehr plötzliche und schnelle Bewegungen ausführen, wenn er sich der Singularität nähert oder sie verlässt. Bei der Platzierung des Roboters im Arbeitsraum und der Definition des Arbeitsraums ist es wichtig, die unten beschriebene Singularitätsposition zu berücksichtigen. Stelle sicher, dass die Bewegung des Roboters in der Nähe einer Singularität keine Gefahr für Personen im Bereich des Roboterarms, des Endeffektors und des Werkstücks darstellt.
Folgende Ursachen führen zur Singularität im Roboterarm:
|
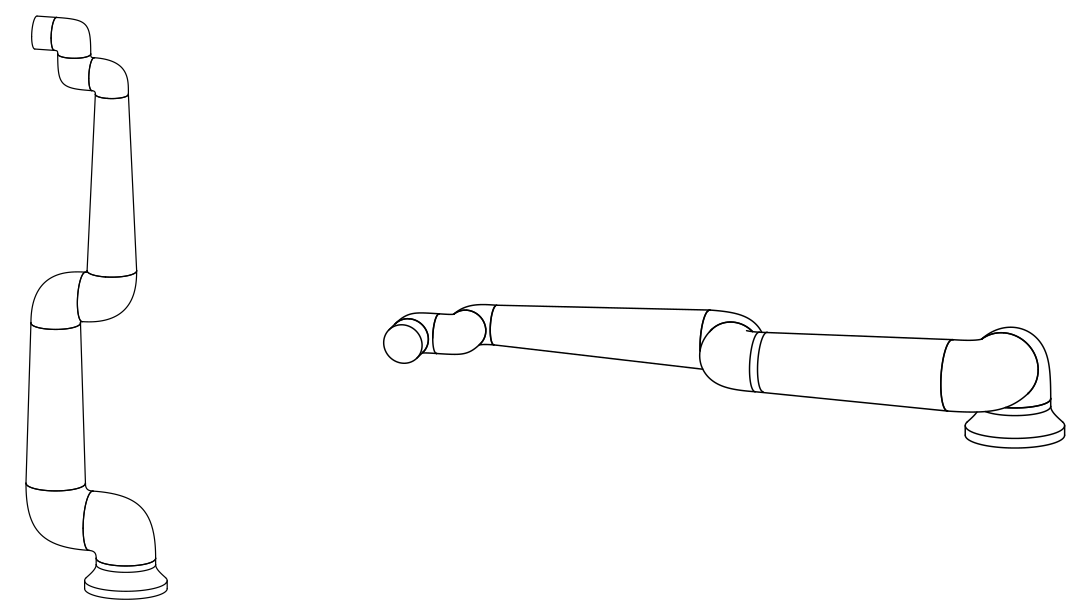
| Äußere Begrenzung des Arbeitsbereichs
|
Die Singularität tritt auf, weil der Roboter nicht weit genug oder außerhalb des maximalen Arbeitsbereichs reichen kann.
Zur Vermeidung: Ordnen Sie die Ausrüstung um den Roboter herum an, damit dieser nicht über den empfohlenen Arbeitsbereich hinausragt.
|
| Innere Begrenzung des Arbeitsbereichs
|
Die Singularität tritt auf, weil sich die Bewegungen direkt über oder direkt unter der Roboterbasis befinden. Dies führt dazu, dass viele Positionen/Orientierungen nicht erreichbar sind.
Zur Vermeidung: Programmieren Sie die Roboteraufgabe so, dass es nicht notwendig ist, im oder in der Nähe des Zentralzylinders zu arbeiten. Sie können auch in Erwägung ziehen, die Roboterbasis auf einer horizontalen Fläche zu montieren, um den zentralen Zylinder von einer vertikalen in eine horizontale Ausrichtung zu drehen und ihn möglicherweise von den kritischen Bereichen der Aufgabe wegzubewegen.
|
| Ausrichtung des Handgelenks
|
Diese Singularität tritt auf, weil sich das Handgelenk 2 auf der gleichen Ebene wie das Schulter-, Ellenbogen- und Handgelenk 1 dreht. Dies begrenzt den Bewegungsbereich des Roboterarms, unabhängig vom Arbeitsbereich.
Zur Vermeidung: Legen Sie die Aufgabe des Roboters so aus, dass es nicht notwendig ist, die Handgelenke des Roboters auf diese Weise auszurichten. Sie können auch die Richtung des Werkzeugs ausgleichen, sodass das Werkzeug horizontal zeigen kann, ohne dass die Handgelenke in einer problematischen Position sind.
|