Bezpečnostní V/V
| Popis |
I/O se dělí na vstupy a výstupy a jsou spárovány tak, aby každá funkce poskytovala možnosti kategorii 3 a PLd.
Při spouštění programů přes V/V nebo sběrnicový vstup může robot zahájit pohyb z aktuální polohy, není nutný žádný ruční přesun k prvnímu bodu trasy přes PolyScope.
|
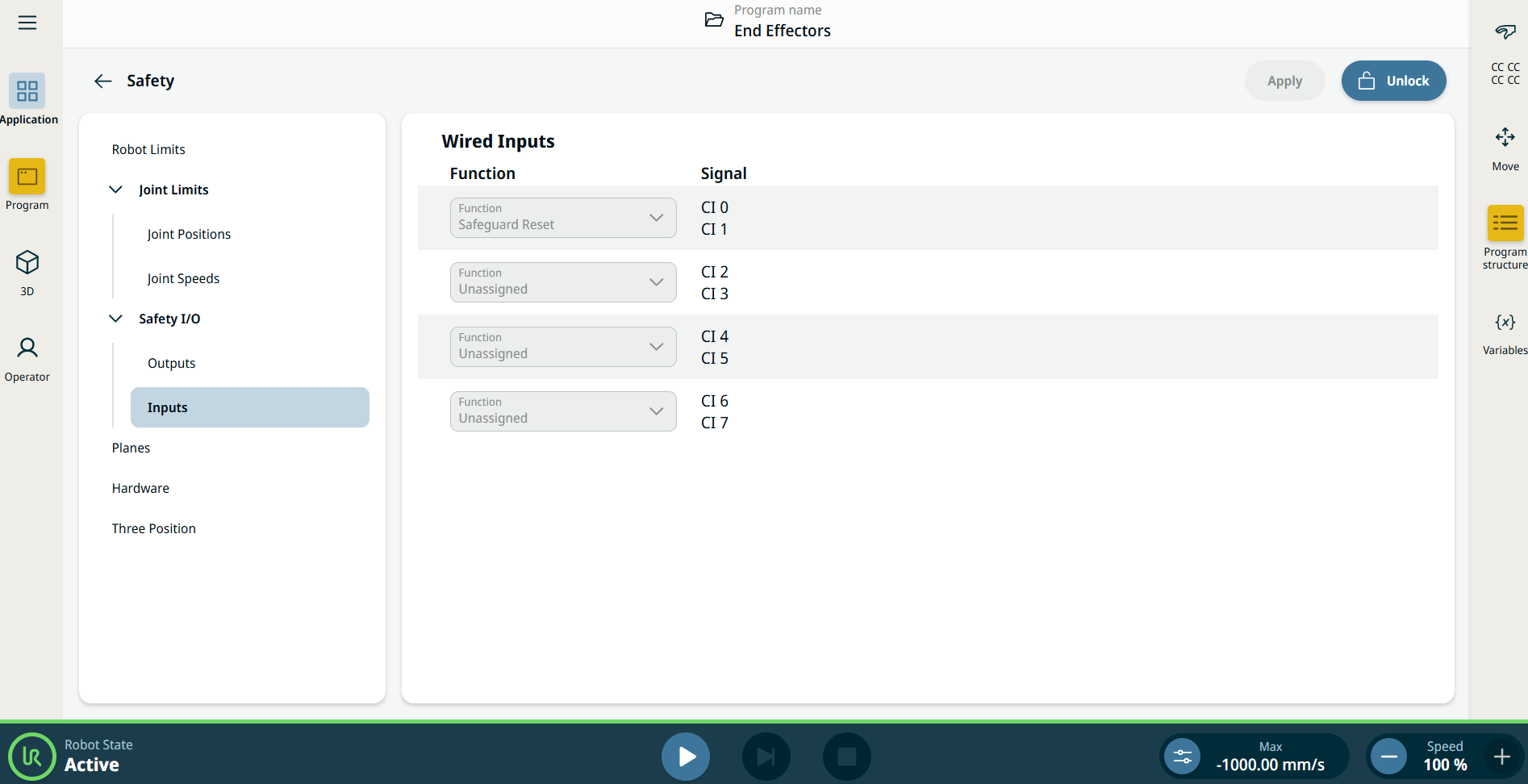
| Ovládací jednotka Vstupy |
Vstupy jsou popsány v následující tabulce:
Pokud je výchozí resetování zabezpečení vypnuto, automatické resetování proběhne, jakmile zabezpečení přestane vyvolávat zastavení. K tomu může dojít, pokud osoba projde bezpečnostním polem. Pokud osoba není detekována bezpečnostními prvky a je vystavena nebezpečí, automatické resetování není podle normy možné.
Pokud je povoleno ochranné zastavení v automatickém režimu, bezpečnostní zastavení se v manuálním režimu nespustí.
|
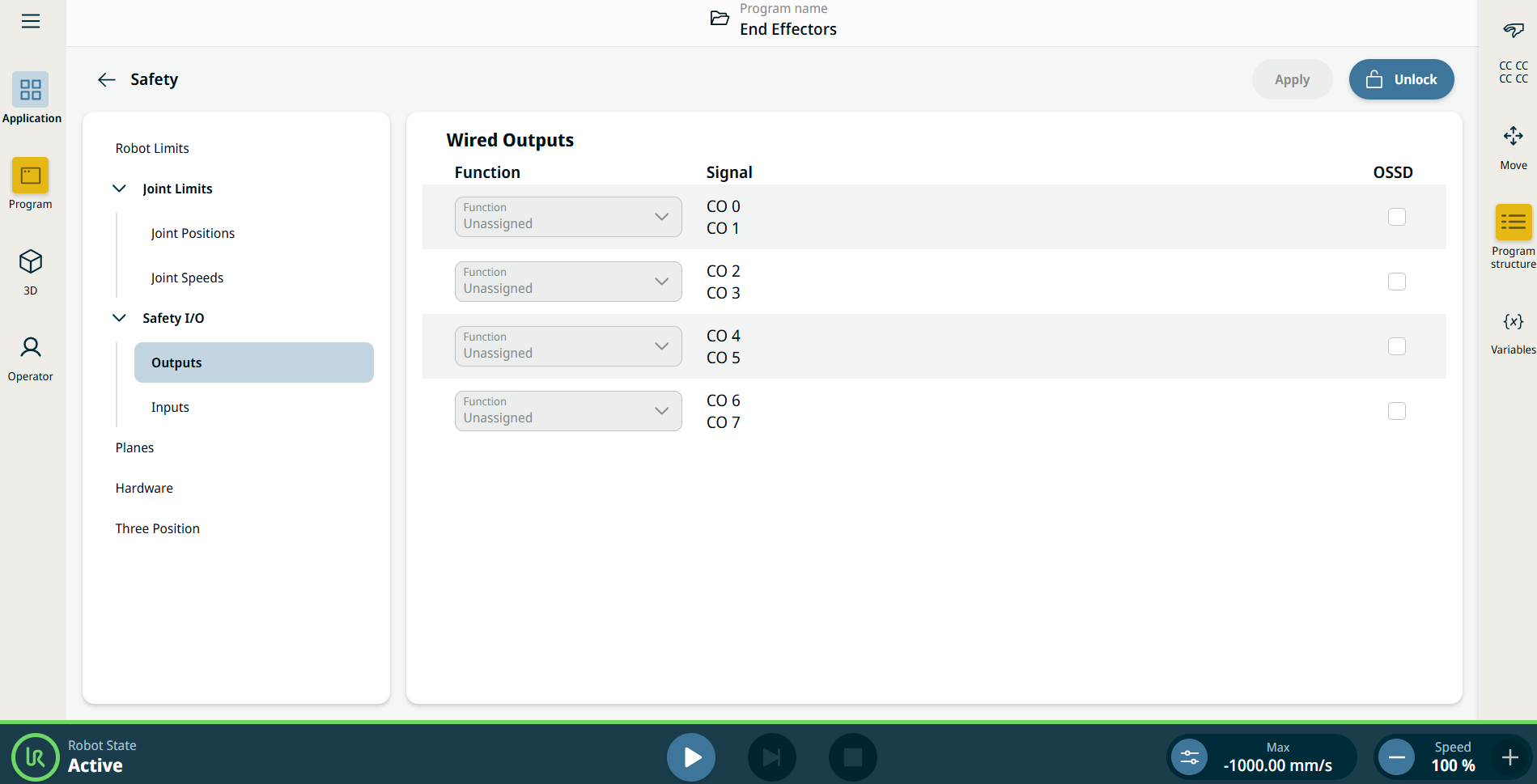
| Výstupy ovládací jednotky |
V případě porušení nebo poruchy bezpečnostního systému jsou všechny bezpečnostní výstupy nízké. To znamená, že výstup zastavení systému iniciuje zastavení, i když nebylo stisknuto tlačítko nouzového zastavení. Můžete použít následující výstupní signály bezpečnostních funkcí. Jakmile skončí stav, který spustil vysoký signál, vrátí se veškeré signály na nízké hodnoty:
Jakékoliv externí zařízení ve stavu Nouzového zastavení od robotu prostřednictvím výstupu Systémového zastavení musí vyhovovat normě ISO 13850. Toto je obzvlášť důležité v sestavách, kde je vstup Nouzového zastavení robota připojen k externímu zařízení pro nouzové zastavení. V takových případech bude na výstupu Systémového zastavení při uvolnění externího zařízení pro nouzové zastavení vysoký signál. To znamená, že stav nouzového zastavení u externího zařízení bude resetován bez potřeby manuálního zásahu obsluhy robota. Dle bezpečnostních norem se u externího zařízení vyžaduje pro pokračování v chodu manuální zásah.
|