Bezpečný domov
| Popis |
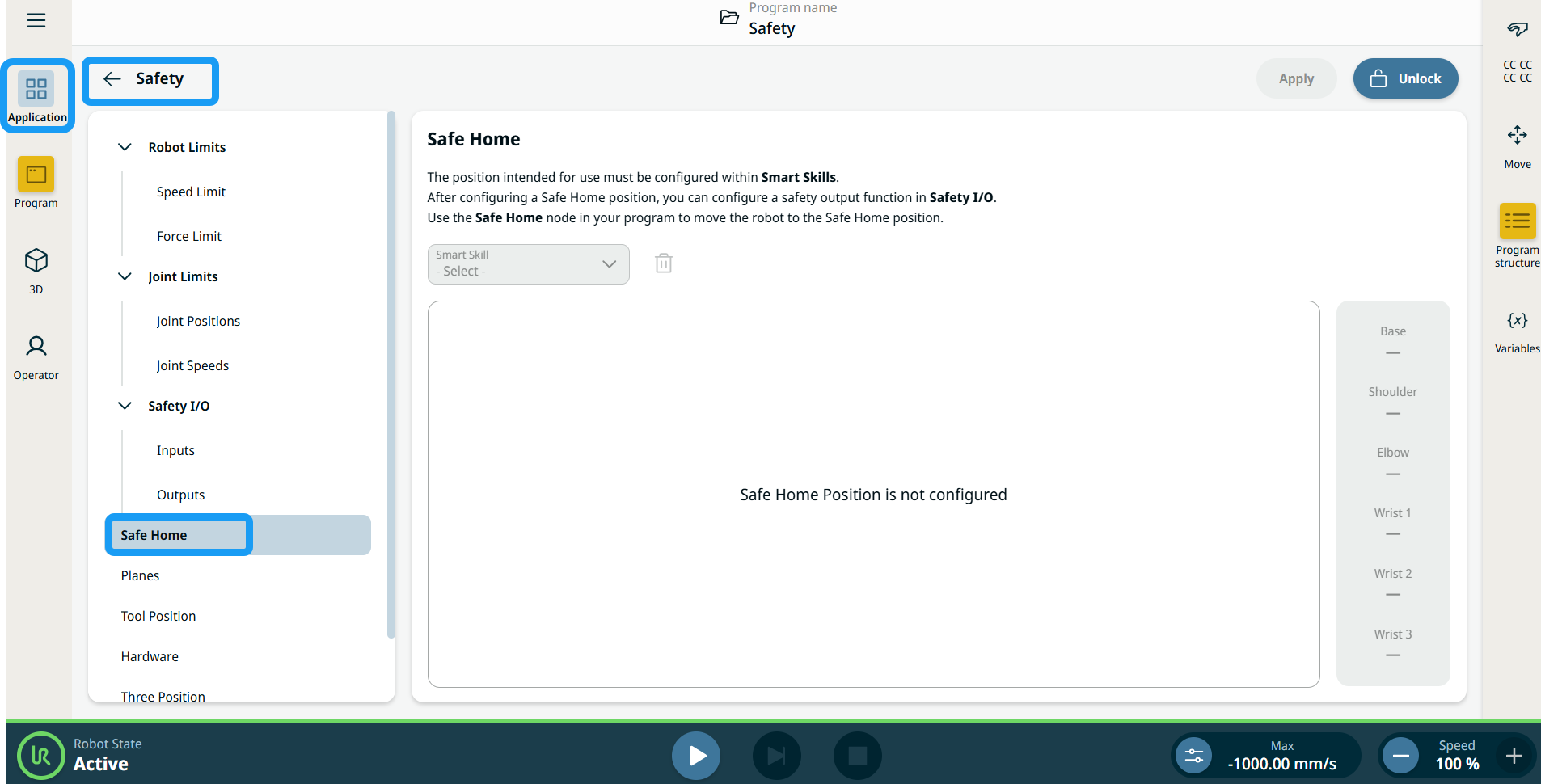
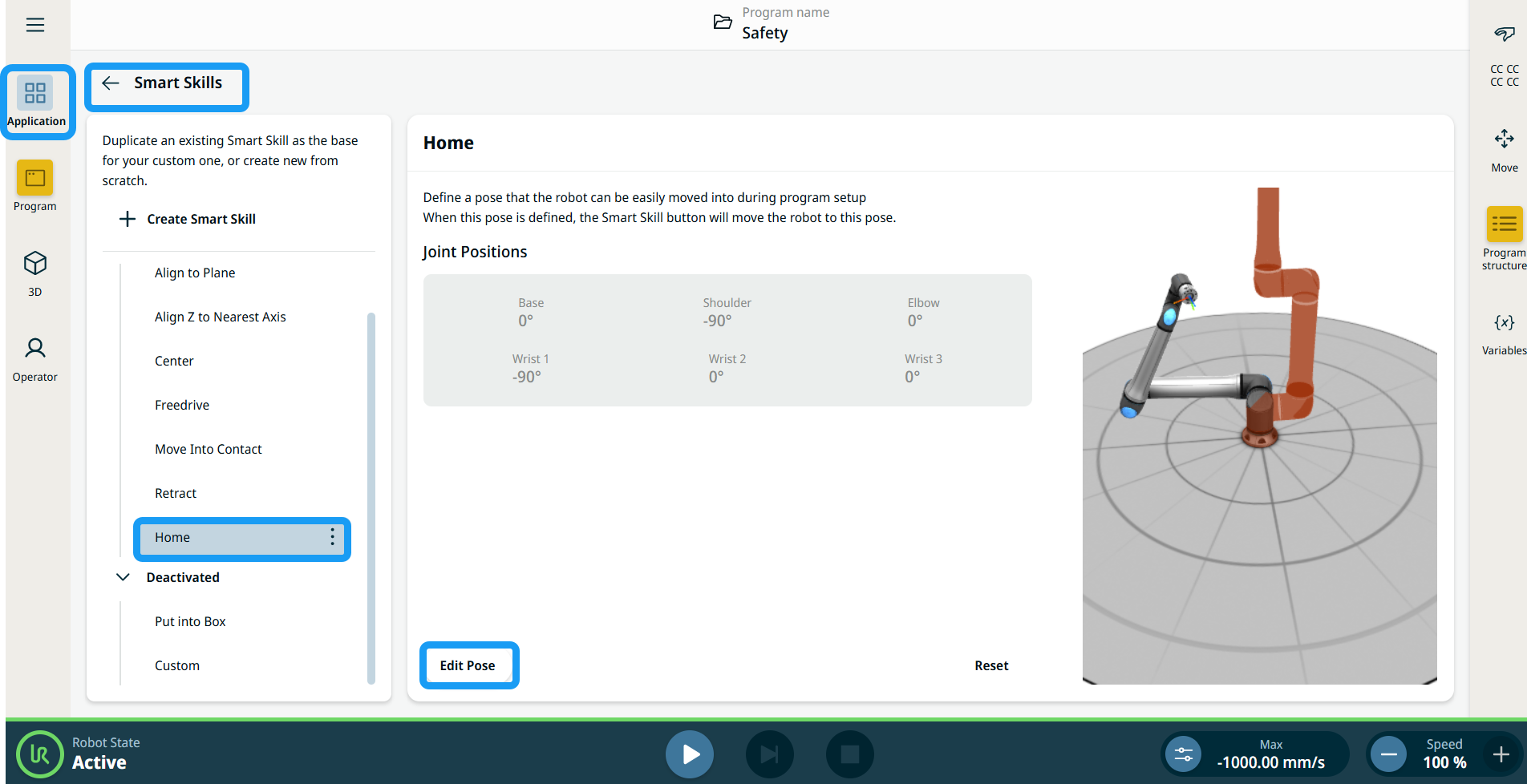
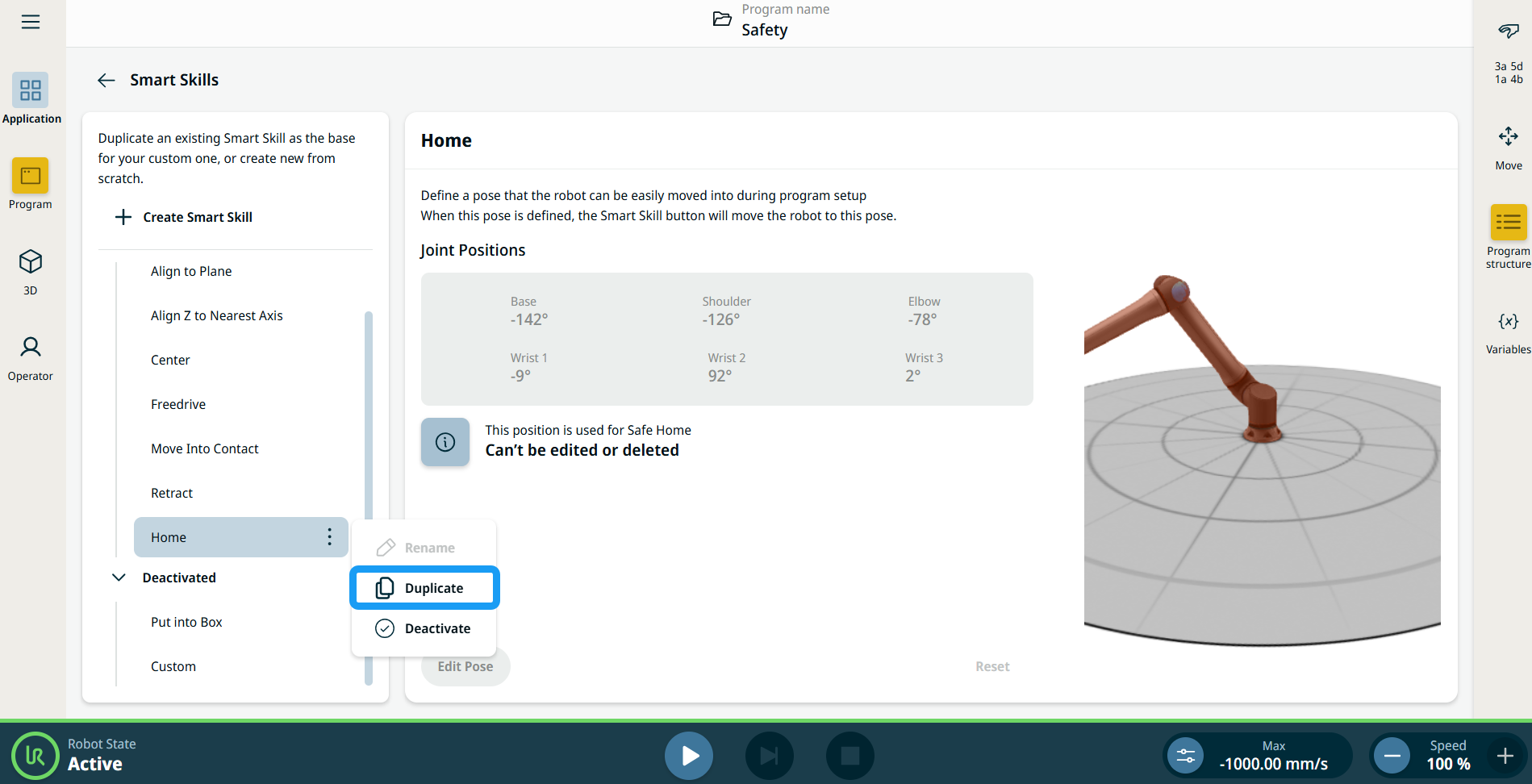
Bezpečná výchozí poloha je funkce PolyScope X, která uživatelům umožňuje definovat bezpečnostní výstup, když robot dosáhne nakonfigurované bezpečné výchozí polohy. Uživatel v rozevíracím seznamu dostupných pozic chytrých dovedností vybere Výchozí poloha, kterou lze přiřadit jako referenci pro Bezpečnou výchozí polohu.
|
|
Přístup k bezpečné výchozí pozici |
|
|
|
|
|
|
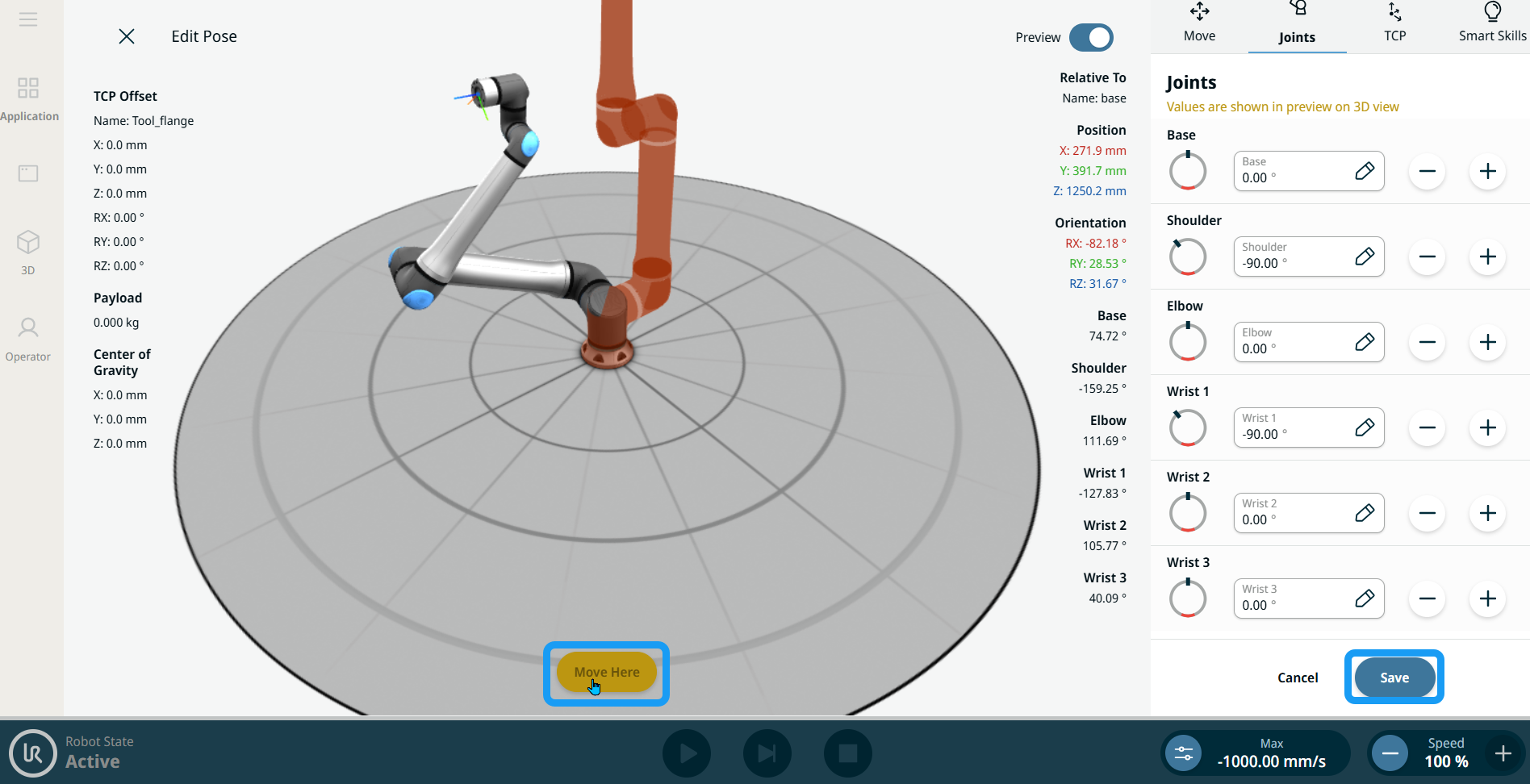
Pokud je jako reference pro Bezpečnou výchozí pozici vybrána inteligentní dovednost pozice:
|
|
Funkce bezpečné výchozí pozice ve výstupech |
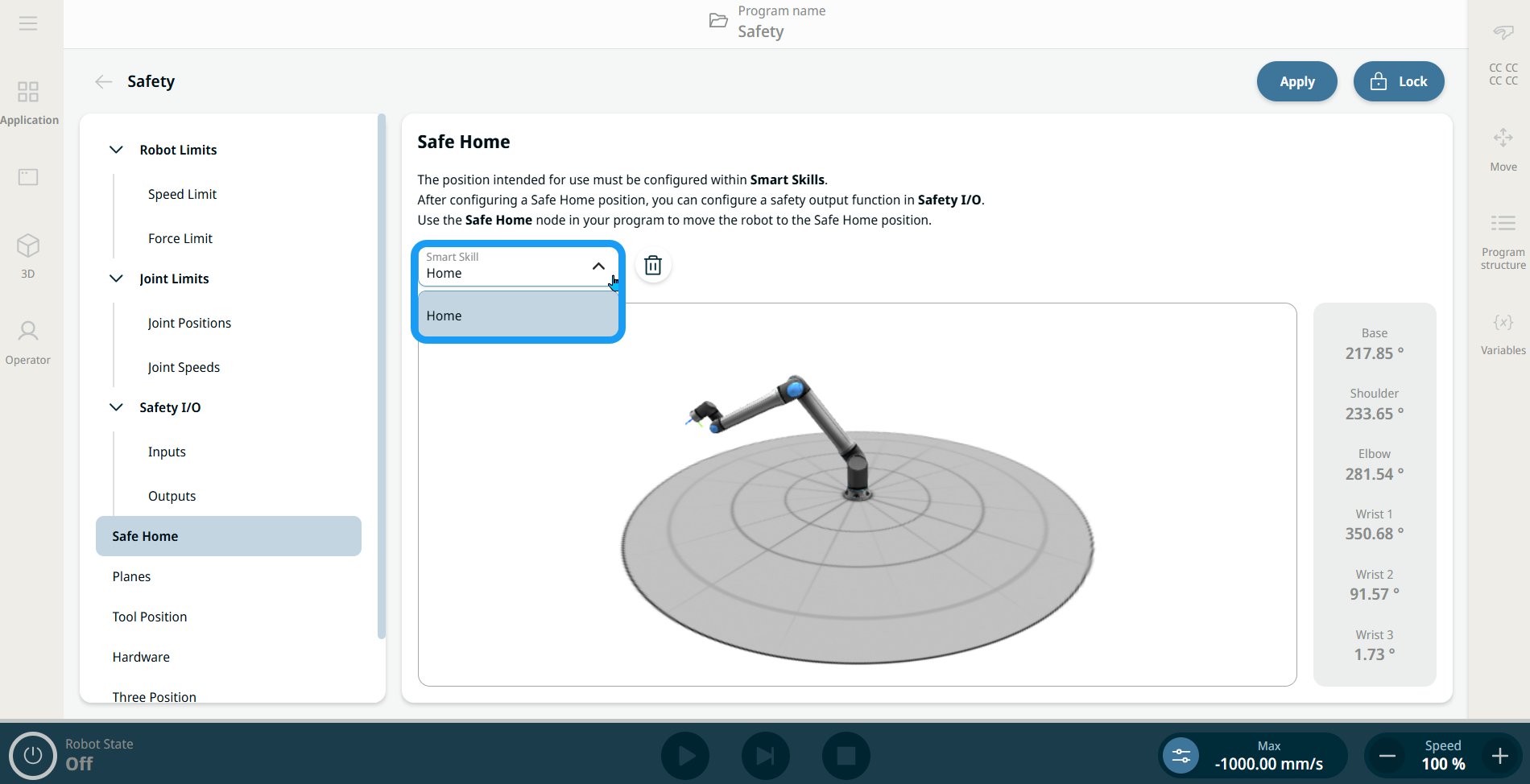
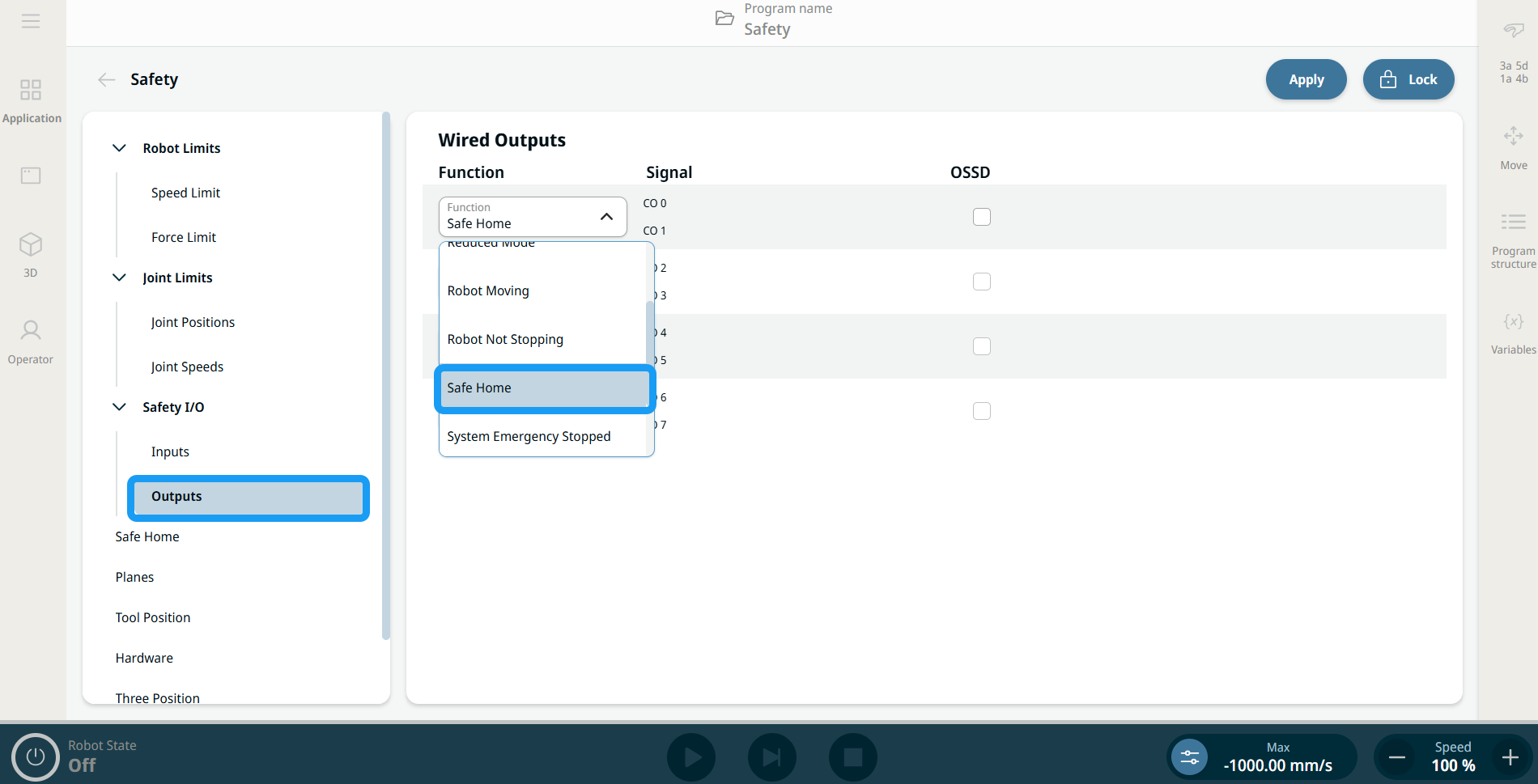
Pokud je Výchozí pozice přiřazena k pozici chytré dovednosti v části Bezpečnost, rozevírací nabídka bezpečnostní výstupní funkce obsahuje Bezpečná výchozí pozice jako nové přiřazení funkce. V poli Funkce v části Výstupy bezpečnostních I/O vyberte možnost Bezpečná výchozí pozice.
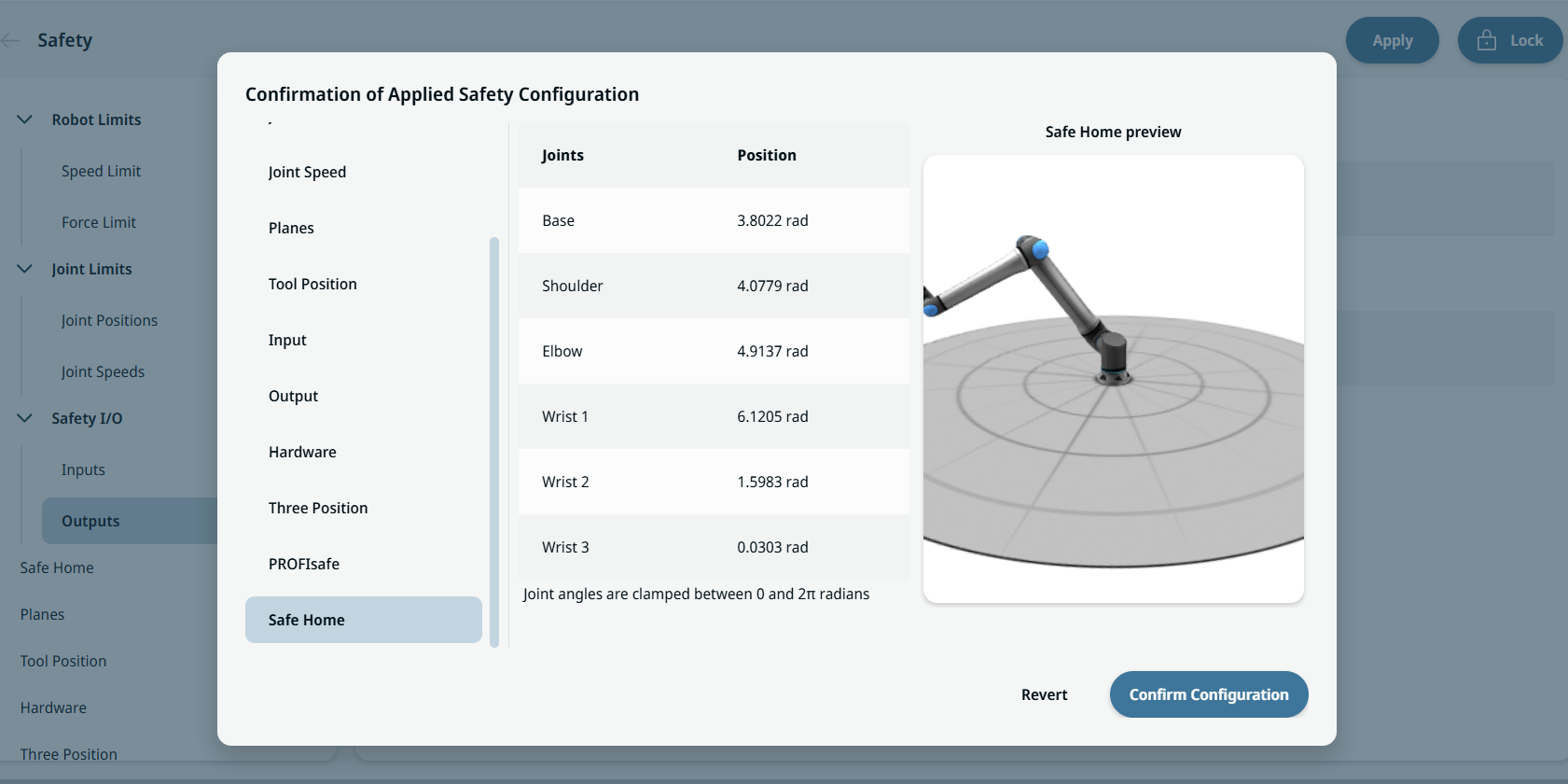
Bezpečnou výchozí pozici lze vidět v tabulce přiřazení funkcí v dialogovém okně Potvrzení použité bezpečnostní konfigurace.
|
|
Bezpečná výchozí pozice jako uzal programu |
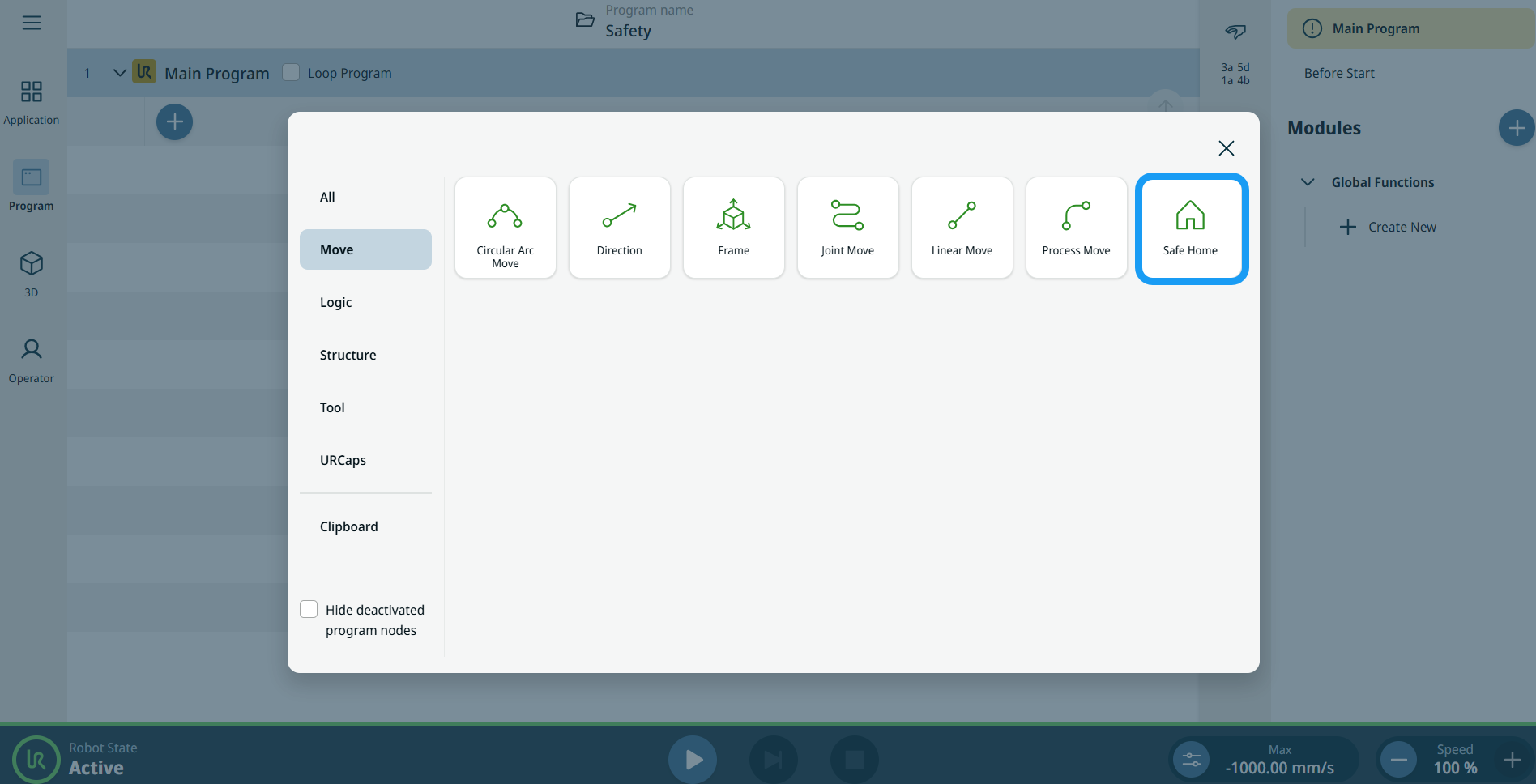
Programový uzel Bezpečná výchozí poloha se nachází v kategorii Pohybové uzly v části Command Nodes. Tento uzel slouží k vydávání příkazů robotu, aby přešel do předem definované bezpečné výchozí pozice, nakonfigurované v nastavení bezpečnostní aplikace pro bezpečnou výchozí pozici.
Pokud přidáte uzel bez nakonfigurované Bezpečné výchozí pozice v nastavení bezpečnosti, uzel bude označen žlutě.

Příkazový uzel Bezpečná výchozí poloha obsahuje možnosti pohybových profilů a další pokročilá nastavení, která se zobrazí po klepnutí na ikonu s třemi tečkami
|
 .
.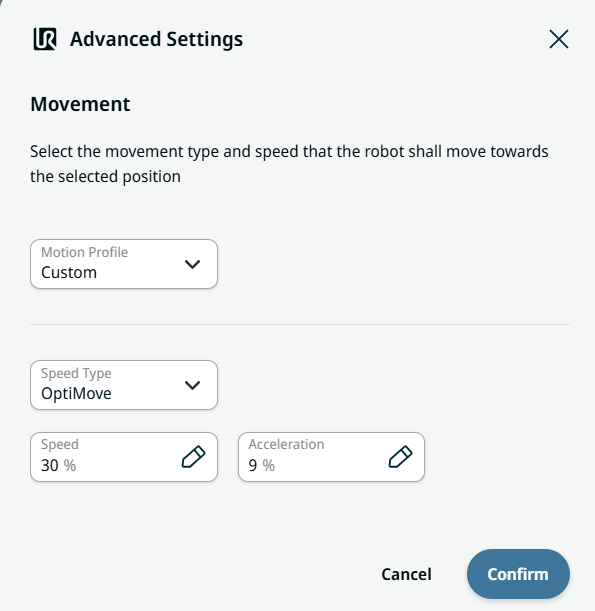
| Pokročilá nastavení |
Uživatelé mohou vytvářet profily pohybu v pokročilých nastaveních pomocí dvou karet a dvou polí:
Profil pohybu je funkce, která uživatelům umožňuje nastavit předdefinované profily pohybu v uzlech pohybu: Pohyb kloubu, Lineární pohyb, Otáčivý pohyb po kružnici, Procesní pohyb a Směr. Vlastní profil pohybu umožňuje uživatelům definovat data pohybu v uzlu pohybu. V poli Typ rychlosti je výchozí volbou OptiMove. Choose Classic movement if you want to input speed and acceleration in degrees per second or mm per second. Nastavení OptiMove je uvedeno v procentech, aby bylo používání a nastavení jednodušší. Uživatelé mohou na kartě Rychlost nastavit preferovanou rychlost v procentech, čímž se nastaví cílová rychlost jízdy jako procento maximální rychlosti robota. Uživatelé mohou nakonfigurovat procento preferovaného zrychlení na kartě Zrychlení, které nastavuje cílové limity točivého momentu během zrychlení a zpomalení jako procento maximálního výkonu robota.
|