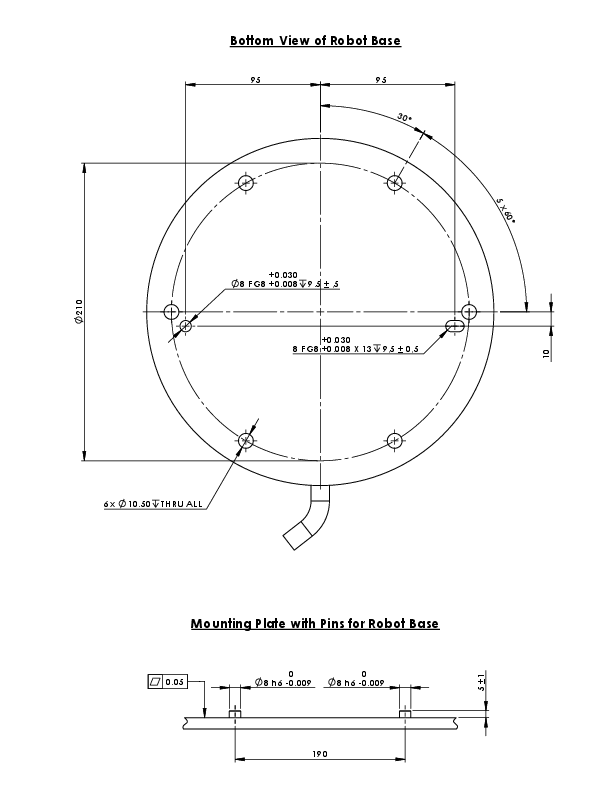
Securing the Robot Arm
| Description |
Dimensions and hole pattern for mounting the robot.
|
| To power down the robot arm |
Unexpected start-up and/or movement can lead to injury
At this point, you can continue to:
|
| To secure the robot arm |
|