IMMI I/O in Regular Program Nodes
| Description |
This section describes how to use IMMI inputs and ouputs in regular program nodes. |
Using the IMMI I/O Overview
| Description |
The IMMI I/O screen provides indicators for inputs signals and options for controlling output signals. The options to control the output signals are, by default, only availabe in robot programming mode. This can be reconfigured as desired in the I/O setup tab found on the Installation screen. On start-up, the 24V signals are high. All other signals are low. In Automatic mode, all signals are high by default. |
IMMI I/O Overview
Control |
These signals are used by the program structures to control the interaction between the robot and the IMM. |
|
|
| Status |
|
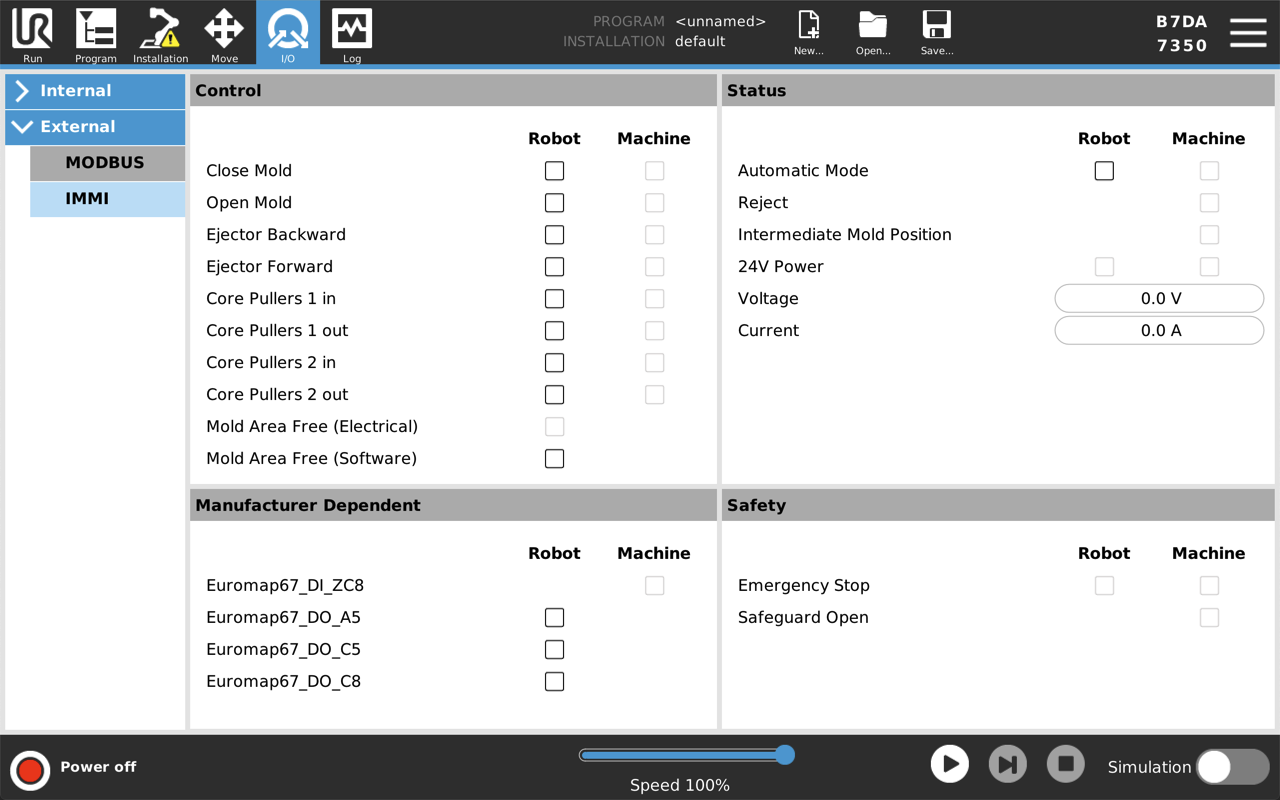
| Manufacturer Dependent |
These signals are optional, but can be used, as needed, for specific purposes by the IMM manufacturer. |
Safety |
In the robot column, the Emergency Stop indicator cannot be controlled from this screen. It simply indicates the robot is emergency stopped. The emergency stop signal from the machine indicates whether the IMM is emergency stopped. The Safeguard Open input shows the state of the "Safety devices" signals specified in the EUROMAP 67 standard. |
|
If a program structure does not include I/O signals, but still intended for use in a robot program, you can use the Action and Wait nodes described in the following section. |
How to Use IMMI I/O in Regular Program Nodes
| Wait |
|
| Set |
|
| Expression |
You can accesss the Expression Editor from multiple nodes.
|