| Description
|
The following tests must be conducted before using the robot application for the first time or after making any modifications.
-
Verify all safety inputs and outputs are correctly connected.
-
Test all connected safety input and output, including devices common to multiple machines or robots, are functioning as intended.
-
Test emergency stop buttons and inputs to verify the robot stops and the brakes engage.
-
Test safeguard inputs to verify the robot motion stops. If safeguard reset is configured, check that it functions as intended.
-
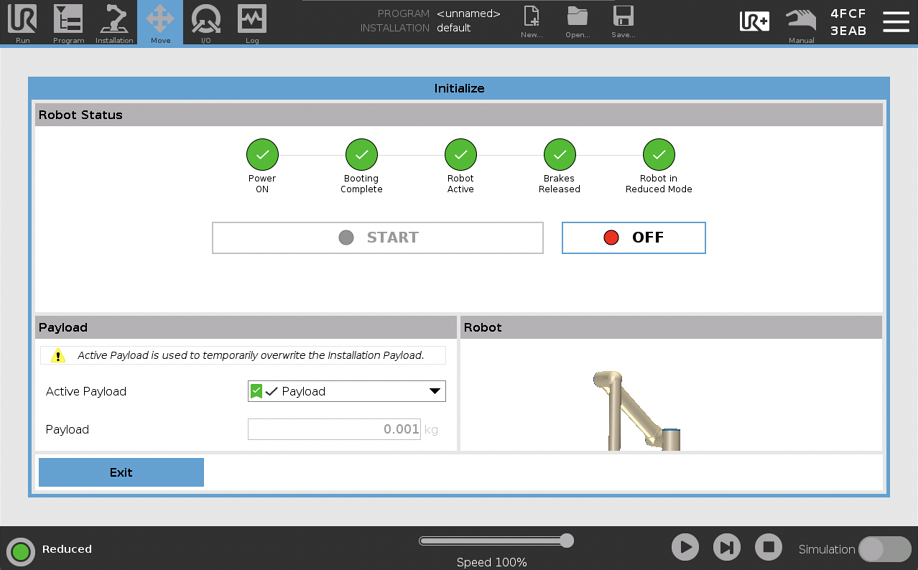
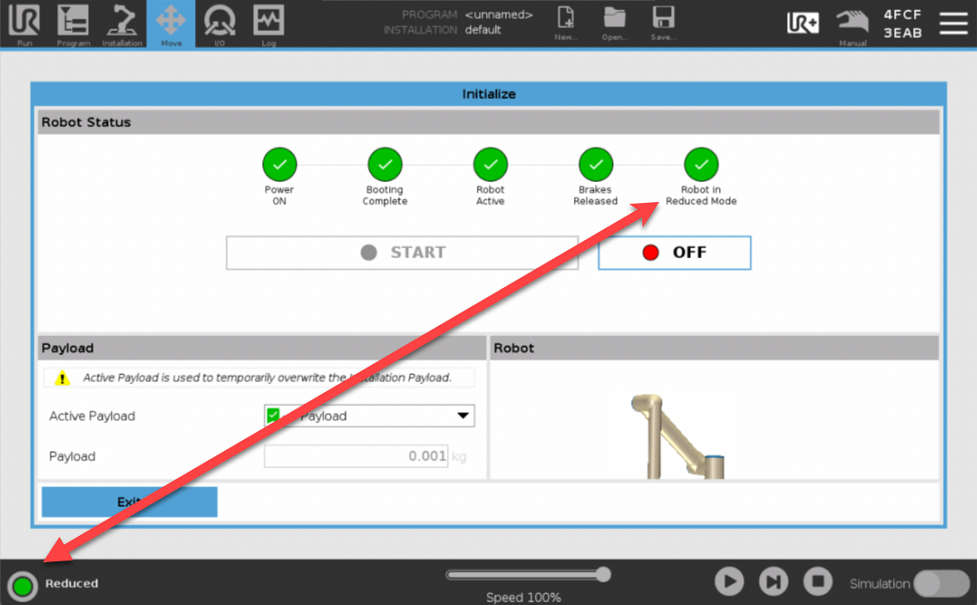
Look at the initialization screen, activate the reduced input and verify the screen changes.
-
Change the operational mode to verify the mode icon changes in top right corner of PolyScope screen.
-
Test the 3-position enabling device to verify that pressing to the center on position enables motion in manual mode at a reduced speed.
-
If the Emergency Stop outputs are used, press the Emergency Stop push-button and verify that there is a stop of the whole system.
-
Test the system connected to Robot Moving output, Robot Not Stopping output, Reduced output, or Not Reduced output to verify the output changes are detected.
-
Determine the commissioning requirements of your robot application.
|