| |
-
Unmount attachment or set tool center point (TCP)/payload/CoG (center of gravity) according to tool specifications.
-
To move the robot arm in freedrive, see figure 3.3 below.
| Standard TP |
3PE TP |
|
On a standard teach pendant (TP), press and hold the freedrive button.
|
On a 3-position enabling teach pendant (3PE TP), rapidly light-press, release, light-press again, and keep holding the 3PE button in this position |
-
Pull/Push the robot to a horizontally elongated position and release. See figure 3.4.
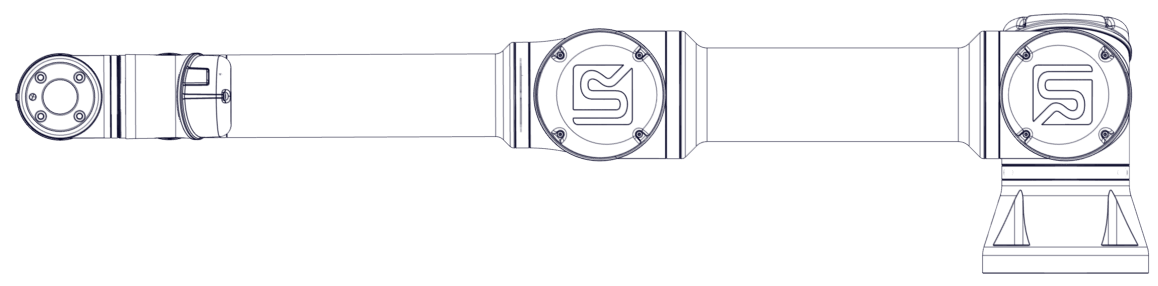
Figure 3.4. Elongated horizontal position of UR robot.
-
Verify the robot arm can maintain the position without support and without pressing the freedrive or 3PE button.
|