Lever Arm
| Description |
A lever arm is defined as the perpendicular distance from the axis of rotation to the line of action of a force. We can use the concept of the lever arm to understand how the reaction torque from a tightening tool can impact the robot.
|
|
Lever Arm Force |
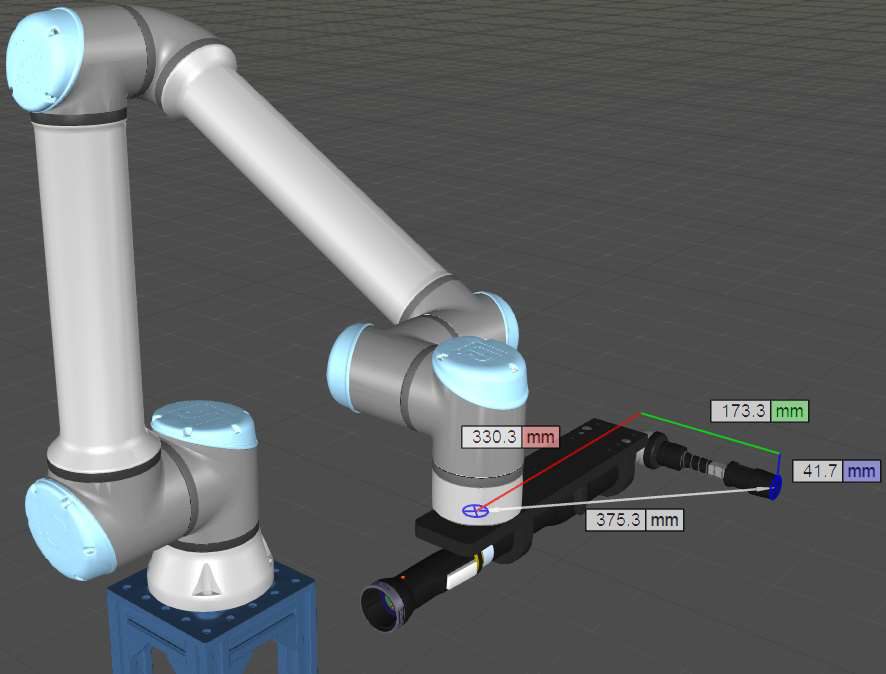
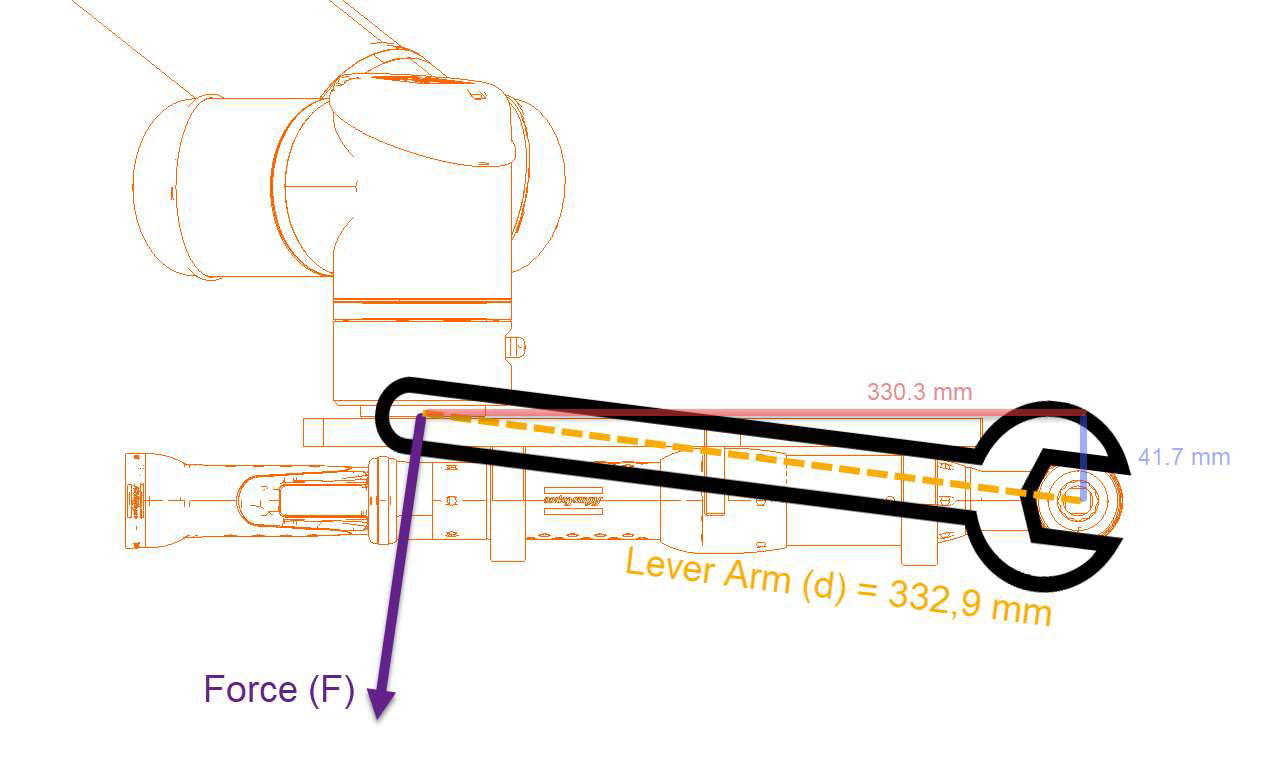
A force applied to a lever arm has maximum effectiveness in producing (or opposing) torque if it is exerted perpendicular to the wrench. The below drawing is intended to convey the basic principle of a torque arm only, since the robot doesn’t need to apply force to produce torque with a wrench; instead the torque is produced by an automatic screwdriver or nut runner, and the robot needs to oppose to the force that is transferred, called torque reaction.
|
|
|
It is important to understand that the lever arm is only measured in the plane perpendicular to the tightening axis. In the example above, the distance of 173.3 mm (shown on the top image in green) in the direction of the tightening axis is not considered for the lever arm calculation.
|
| Torque Calculation |
The amount of force required at the tool output flange of the robot, can be calculated with the target torque (moment) and lever arm, using the equation: Moment = Force x Distance or M = (F)(d). For example:
Target Torque: 30 Nm Lever Arm: 0.3329 m Force = Moment / Distance = 30 Nm / 0.3329 m = 90 N
Universal Robots safety system by default limits the force at the tool output flange of the robot at 150 N (125 N considering the tolerance of 25 N), which can be increased up to 250 N. The robot is not always capable of generating or withstanding forces at the tool up to these limit values, but they can restrict the forces that the robot can generate/withstand.
|
| Torque Examples |
The below table shows some examples of different combinations of tightening torques and lever arm lengths and the resulting reaction forces (intended to demonstrate the relationship between the parameters only, does not necessarily mean that the robot can handle this torque):
While increasing the lever arm reduces the torque reaction (transferred force to the robot), it should be considered that it will also reduce the capacity of the robot to apply force against the screw. This is because there is also a lever arm operating in the reverse direction, reducing the amount of force that can be generated from the torque of the robot joints.
|