Blend Trajectories
| Description |
Blending enables the robot to smoothly transition between two trajectories, without stopping at the waypoint between them. Therefore, your robot program will run faster.
|
|
Blend Trajectories |
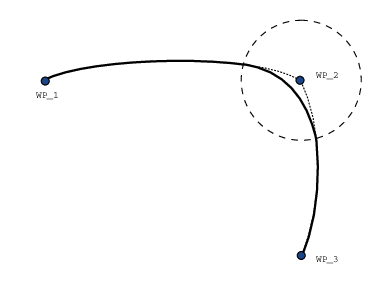
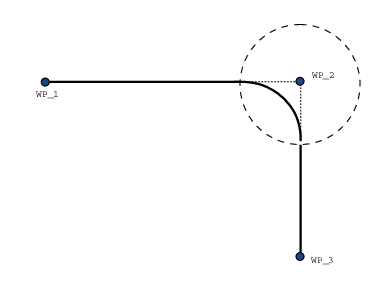
14.1: Joint space (MoveJ) vs. cartesian space (MoveL) movement and blend. |
|
|
Depending on the movement type (i.e., MoveL, MoveJ, or MoveP), different blend trajectories are generated.
|