|
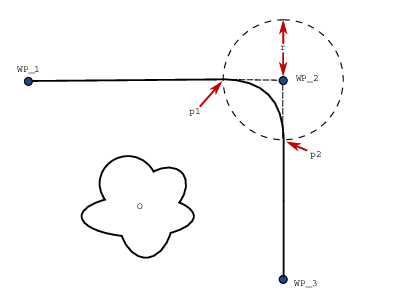
If a blend radius is set, the robot arm trajectory blends around the waypoint, allowing the robot arm not to stop at the point.
Blends cannot overlap, so it is not possible to set a blend radius that overlaps with the blend radius of a previous or following waypoint.
If there is overlap of two blends, there will be a warning logged in the Log tab. See the Log tab for more information.
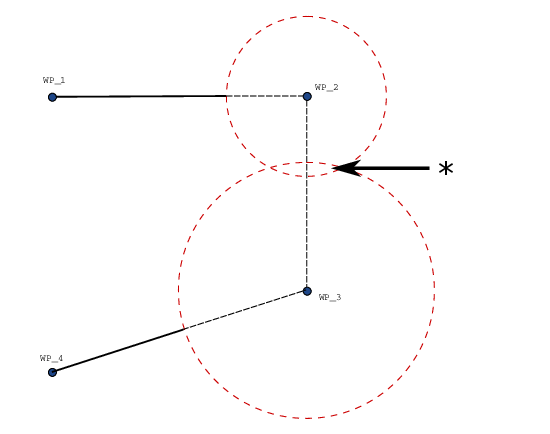
14.3: Blend radius overlap not allowed (*).
|