| Wait for digital input
|
This Wait command type allows the robot to hold position until a signal is received from a digital input.
|
| Add a Wait for digital input to a robot program
|
-
In your Robot Program, select the place or node where you wish to add a Wait command.
-
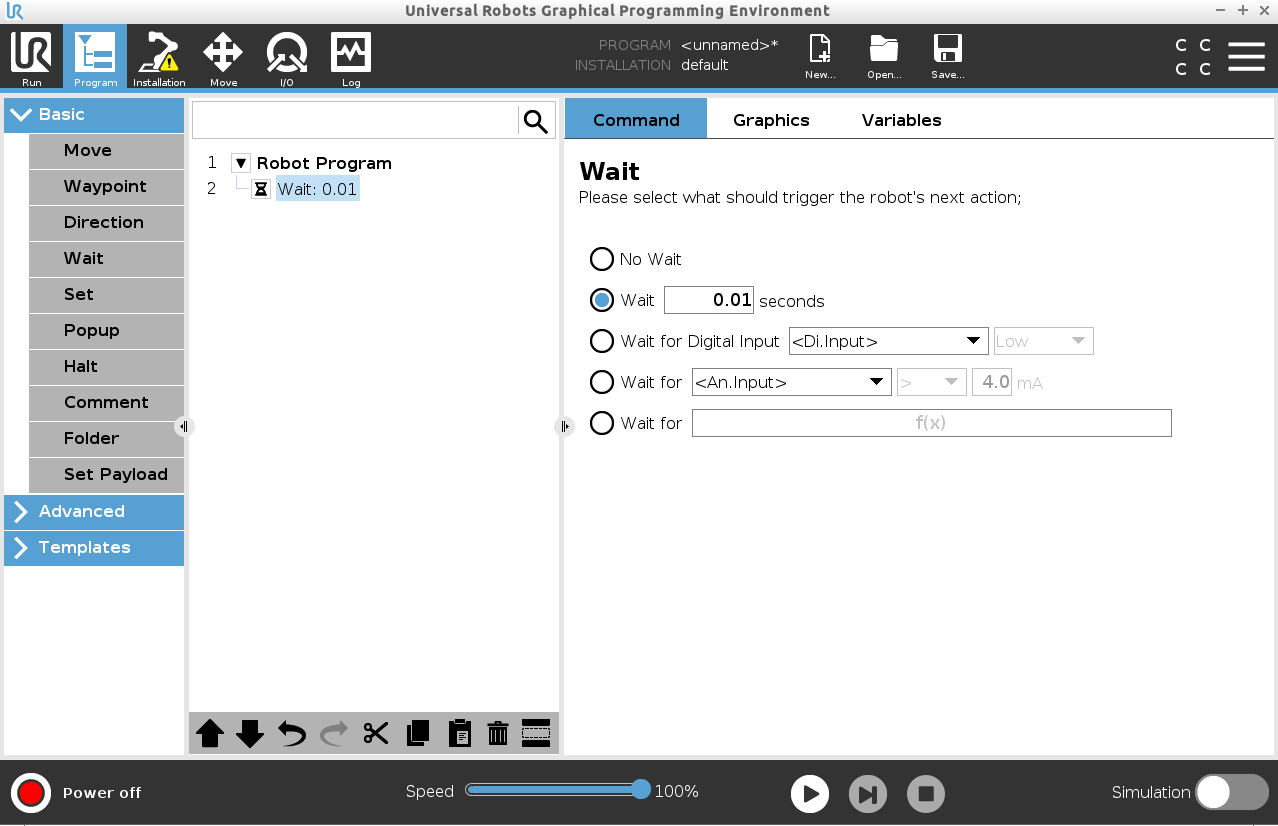
Under Basic, tap Wait.
-
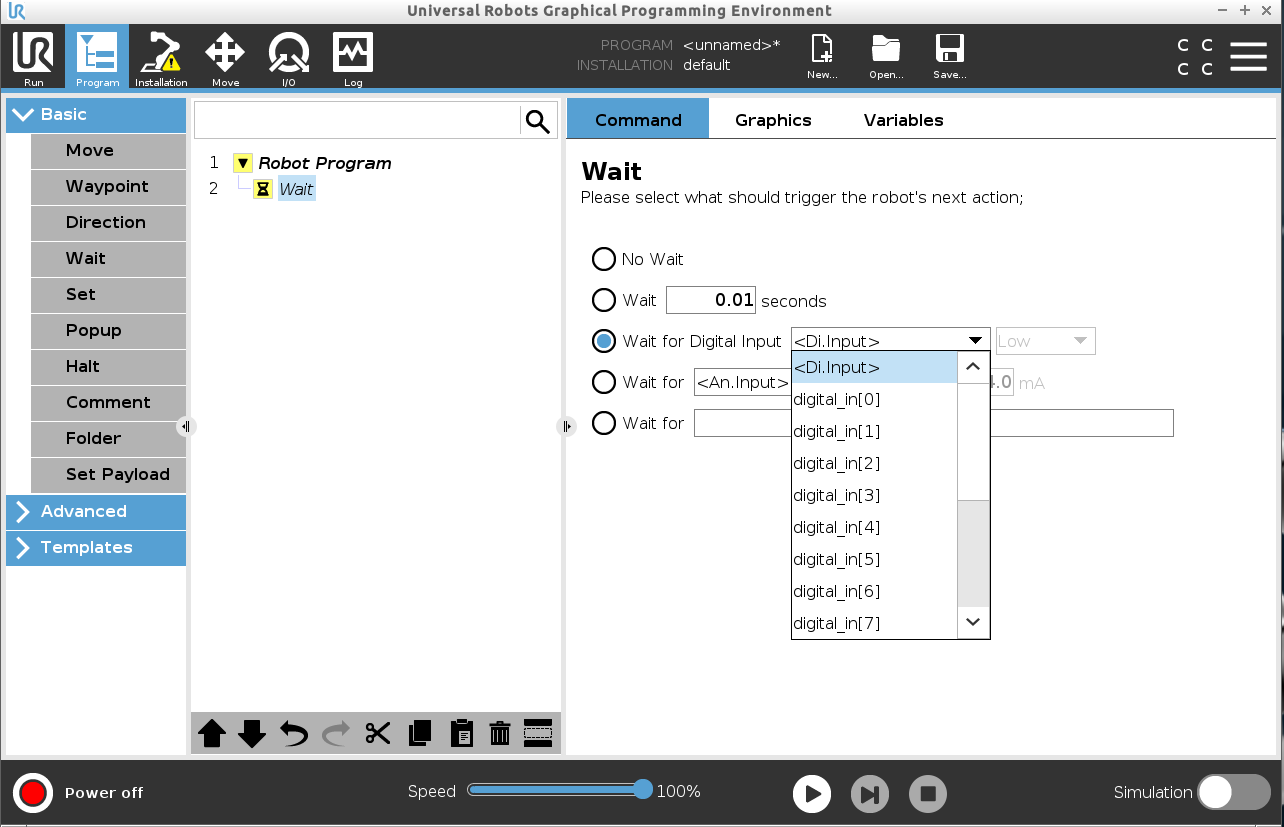
Tap the Wait for Digital Input selector.

More definition is required for this Wait type.
-
In the Di.Input dropdown menu, select a new digital input.
-
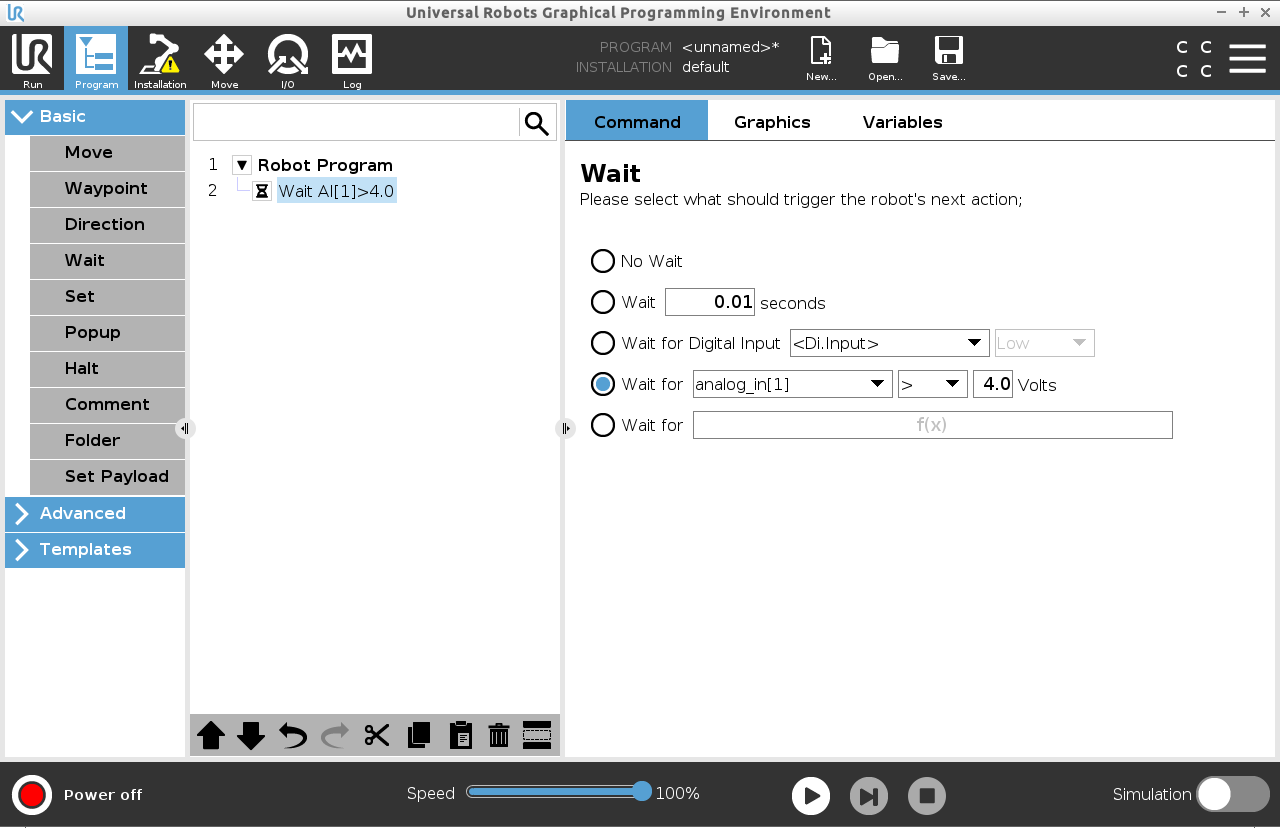
In the signal box, assign a Low or High signal type to the new digital input.
If you have multiple digital inputs, you can rename each one to make it easier to find them.
|
| Example: Wait for digital input
|
If you have an external sensor at the end of a conveyor, you will use this function to wait for a command from the sensor, which tells the robot program that there is a work piece at the end of the conveyor.
|