| Feature and Tool Position
|
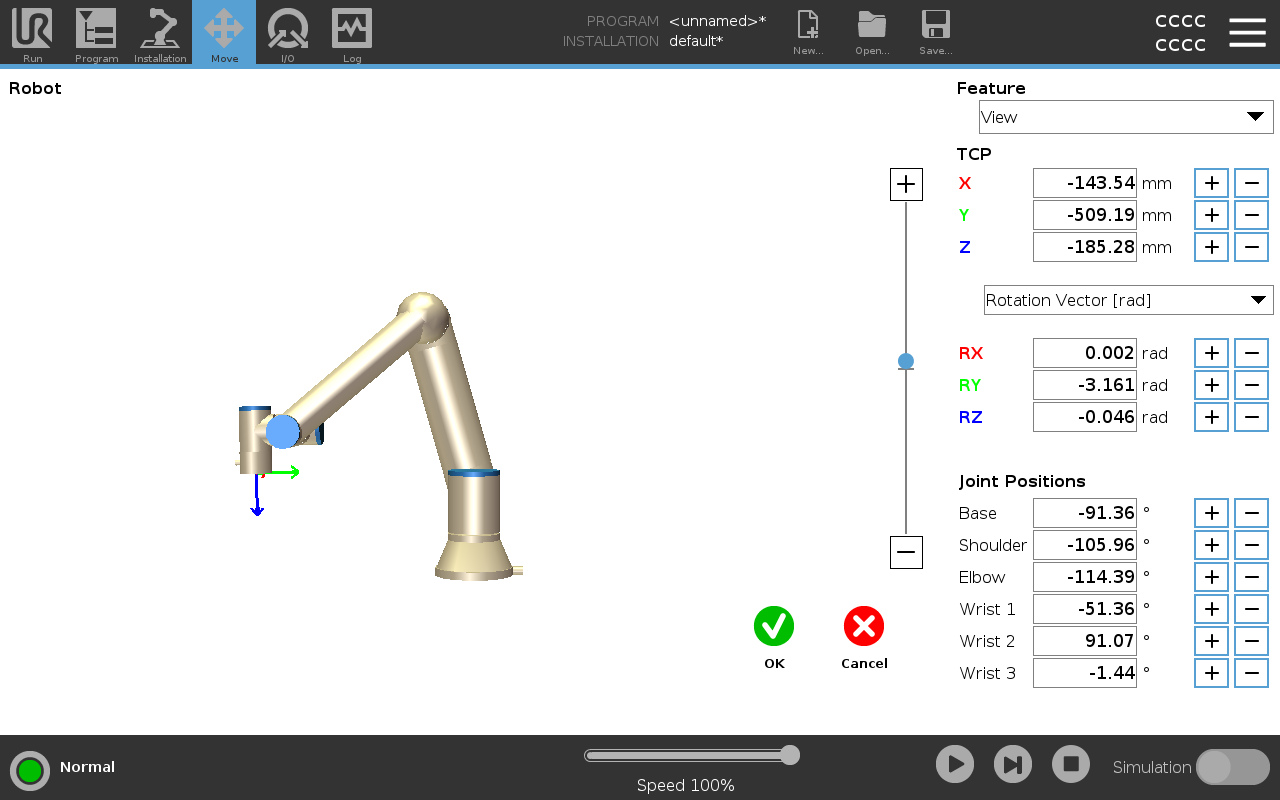
The active TCP and coordinate values of the selected feature are displayed. The X, Y, Z coordinates specify tool position. The RX, RY, RZ coordinates specify orientation. For further information about configuring several named TCPs.
Use the drop down menu above the RX, RY and RZ boxes to choose the orientation representation type:
-
Rotation Vector [rad] The orientation is given as a rotation vector. The length of the axis is the angle to be rotated in radians, and the vector itself gives the axis about which to rotate. This is the default setting.
-
Rotation Vector [∘] The orientation is given as a rotation vector, where the length of the vector is the angle to be rotated in degrees.
-
RPY [rad]Roll, pitch and yaw (RPY) angles, where the angles are in radians. The RPY-rotation matrix (X, Y’, Z” rotation) is given by:
Rrpy(γ, β, α) = RZ(α) ⋅ RY(β) ⋅ RX(γ)
-
RPY [∘]Roll, pitch and yaw (RPY) angles, where angles are in degrees.
You can tap the values to edit the coordinates. You can also tap the + or - buttons to the right of a box to add/subtract an amount to/from the current value. Or you can hold down a button to directly increase/decrease the value.
|