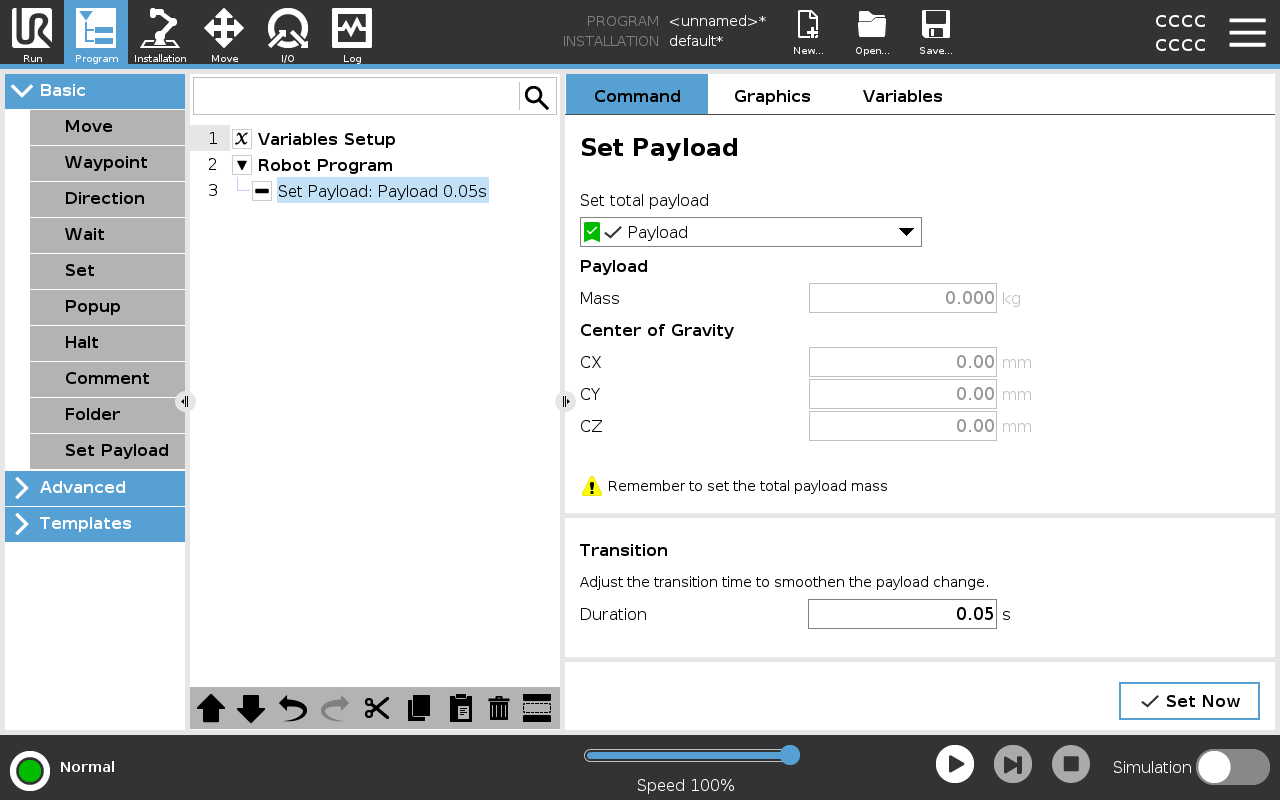
Set Payload
| Set Payload | |
| Use the Set Payload command |
|
| Tip |
You can also use the Set Now button to set the values on the node as the active payload. |
| Use tip |
Remember to always update your payload when making any changes to the configuration of the robot program. |
| Example: Set Payload |
In a pick and place program, you would create a default payload in the installation. Then you add a Set Payload when picking up an object. You would update the payload after the gripper closes, but before starting to move. Additionally, you would use the Set Payload after the object has been released. |
| Payload Transition Time |
This is the time it takes the robot to adjust for a given payload. At the bottom of the screen, you can set the transition time between different payloads. You can add a payload transition time in seconds. Setting a transition time larger than zero, prevents the robot from doing a small "jump", when the payload changes. The program continues while the adjustment is taking place. Using the Payload Transition Time is recommended when picking up or releasing heavy objects or using a vacuum gripper.
|