Screwdriving Setup
| Description |
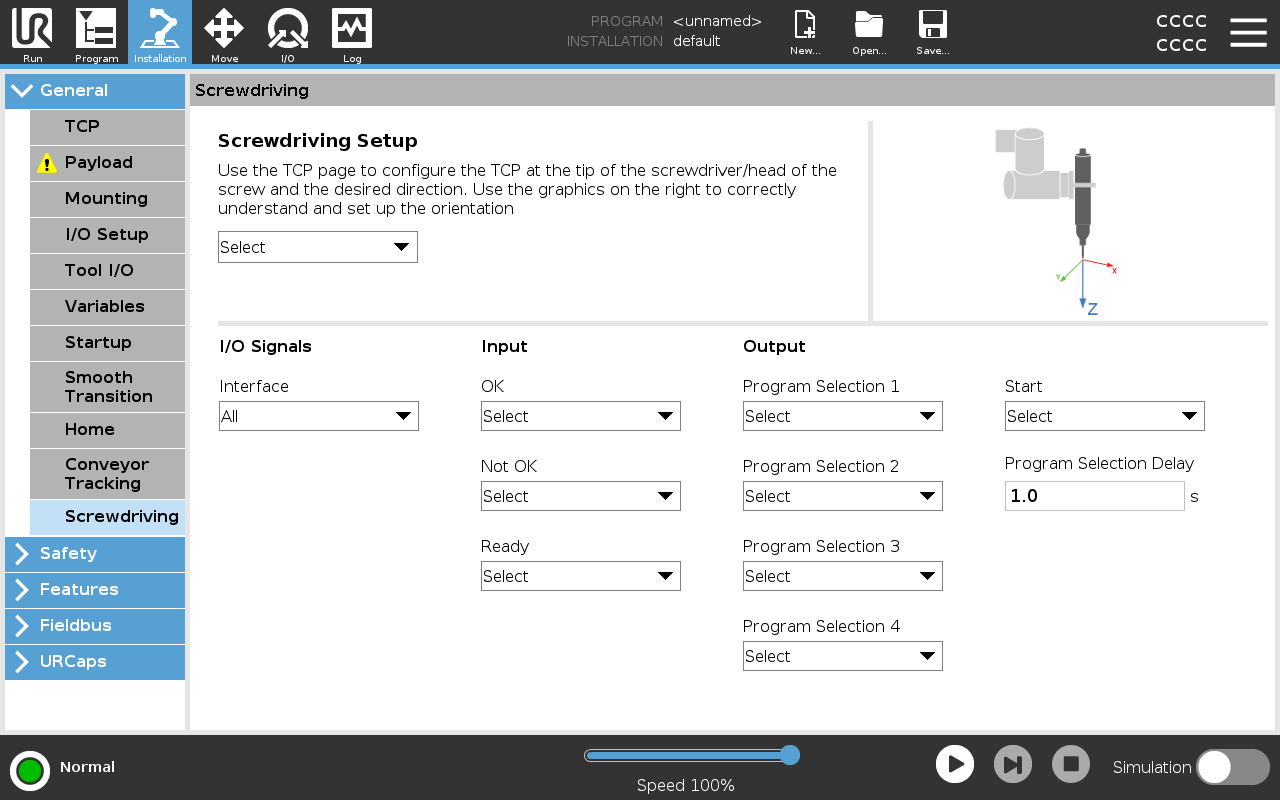
The Screwdriving Setup provides options for configuring the robot to work with an industrial screwdriver or an industrial nutrunner. You can setup the screwdriver’s position with respect to the robot’s tool flange and electrical interface.
|
| Configuring a Screwdriver |
In any output Program Selection list under Output, you can select an integer output to switch Program Selection to a number field.
|
| Configuring the Screwdriver Position |
You can visualize the X, Y and Z coordinates of the selected TCP to confirm it matches the tool’s bit or socket.
|
| Configuring the Screwdriver Interface |
|
|
Typical Orientation values |
Values (in Rotation Vector [rad] notation) are illustrated in the table below.
|
|||||||||||||||||||||||





