|
The Move command allows the robot to move from point A to point B.
How the robot moves is important to the task the robot is performing.
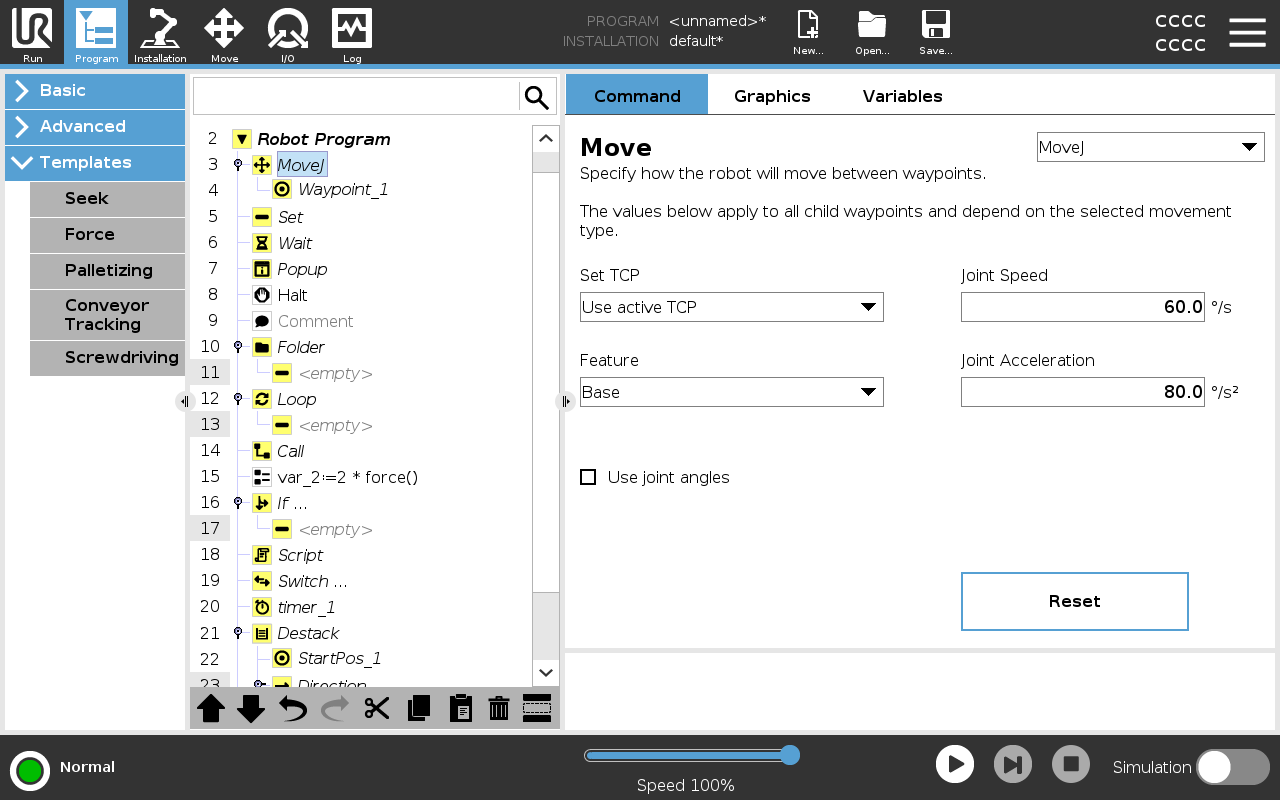
When you add a Move to your program tree, the Move pane appears to the right of the screen.
The Movecommand controls the robot's motion via waypoints.
Waypoints are automatically added when you add Move commands to a program.
You can also use Moves to set acceleration and speed for the robot arm's movement between waypoints.
See the following sections about using a Move:
The robot moves using four Move commands:
-
MoveJ
-
MoveL
-
MoveP
-
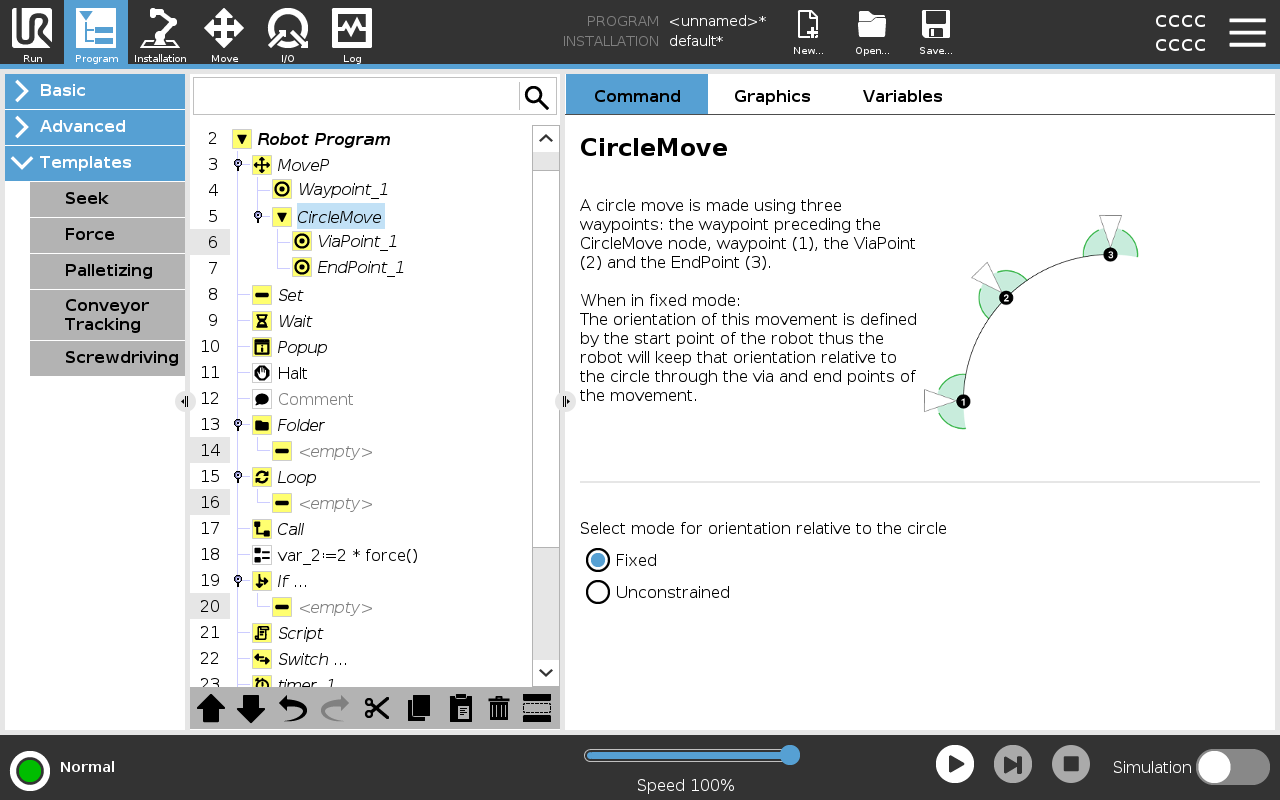
MoveCircle
|