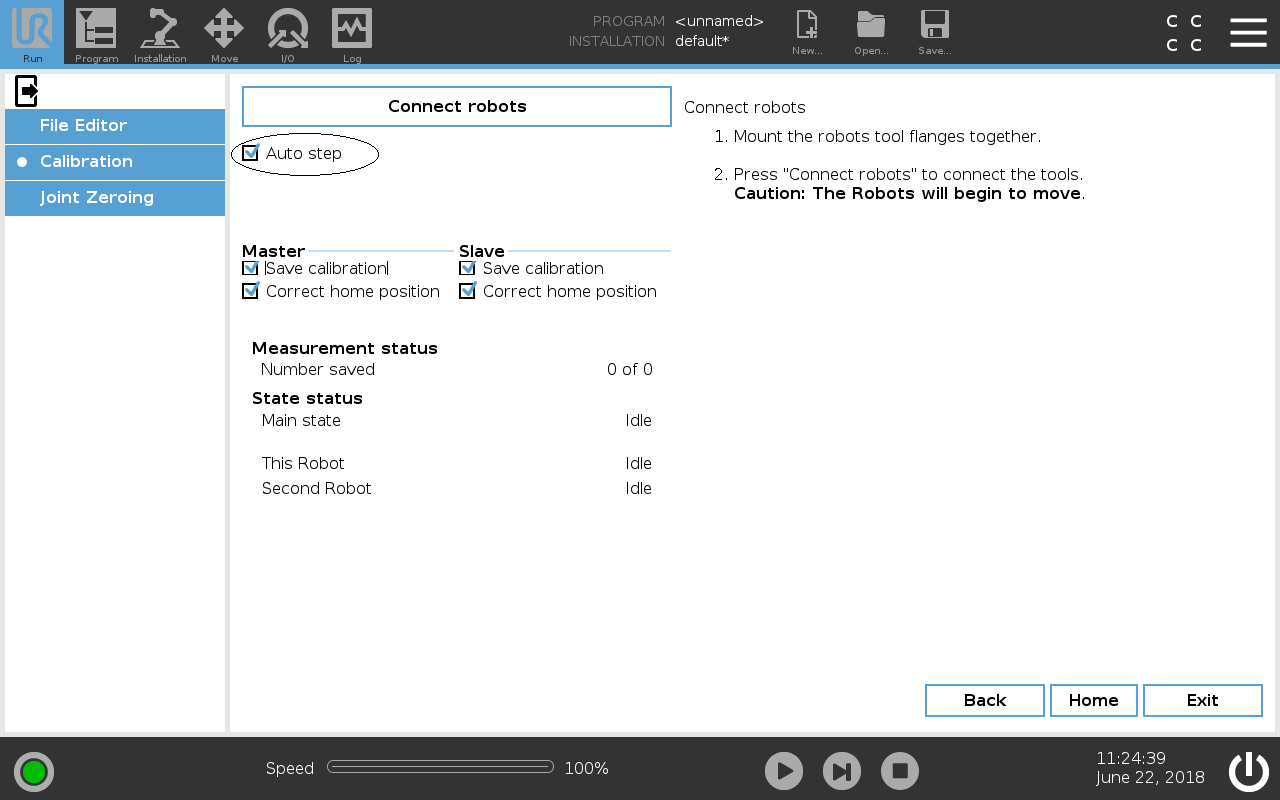
How to calibrate the robots
Dual calibration is performed automatically, so you only need to start the process.
You can select the following options, for each robot before the calibration starts:
-
Save calibration: The calculated kinematic calibration is applied and saved on the robot.
-
Correct home position: Estimates and sets the Home Position using the calibration (define new joint offset angles).
To start the calibration
-
Ensure the Calibration Conector securely attaches both tool flanges.
-
If operator intervention is required during the calibration, you can disable the Auto step checkbox.
-
Tap Proceed and stand clear of the robots, as they start moving around.