Command Tab
|
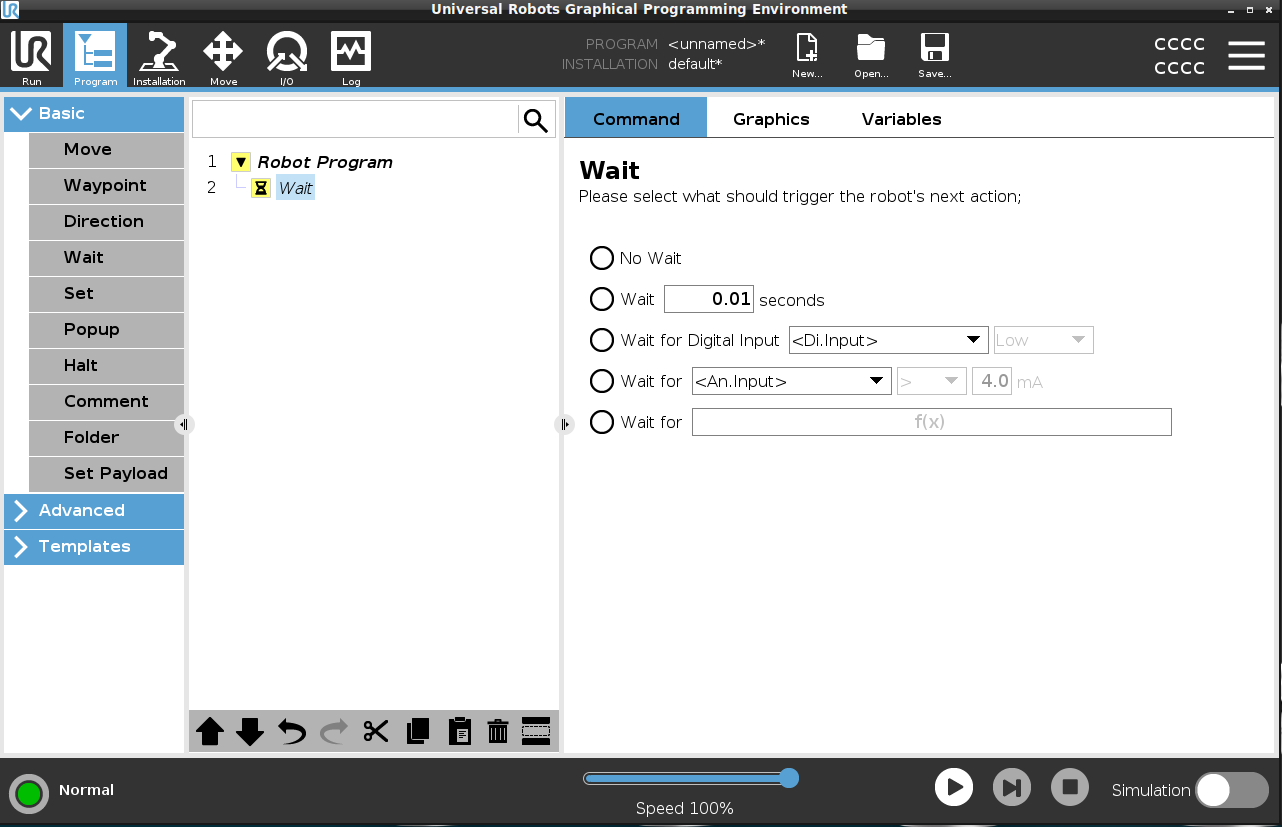
Wait |
You can use the Wait command to make the robot program wait for a signal from a sensor that is attached to the control box.
|
|
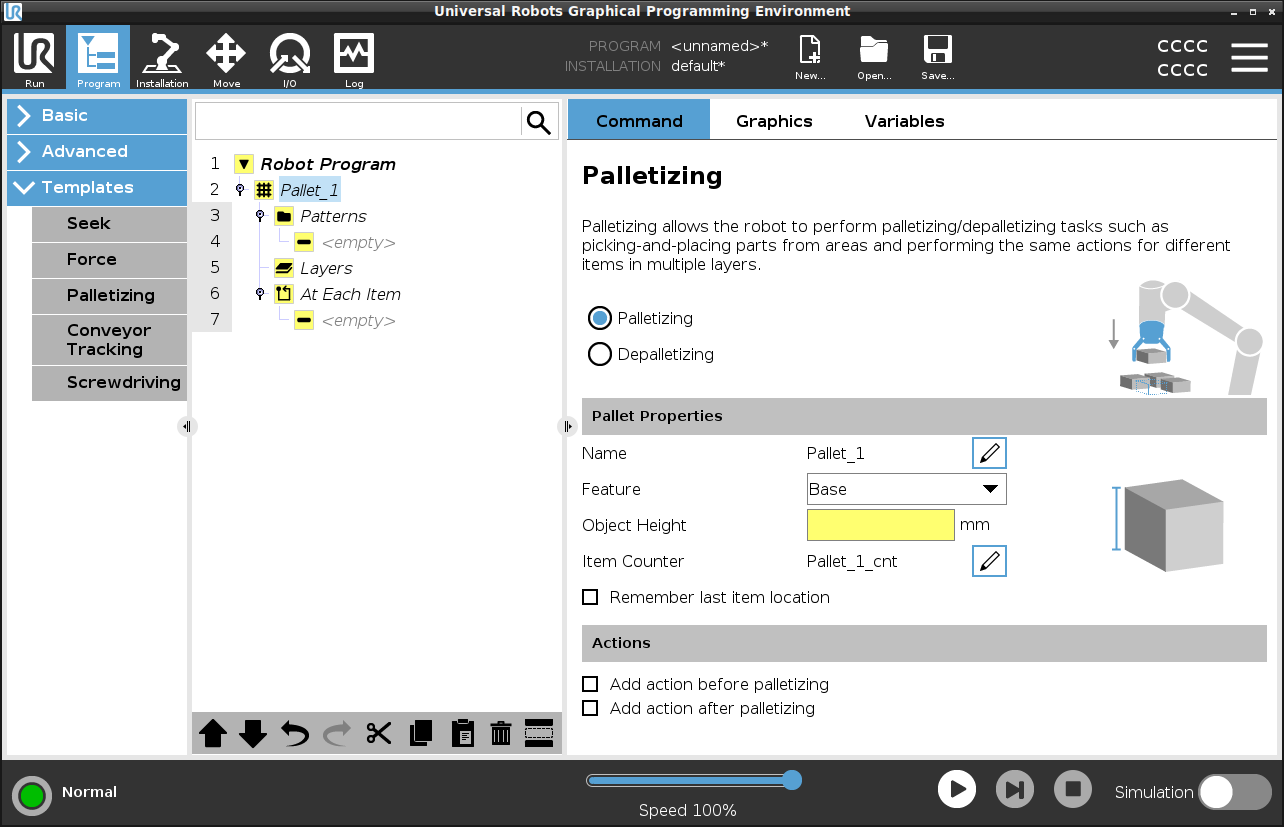
Palletizing |
You can use the palletizing template to quickly create a palletizing program. The same palletizing program is also used to create a depalletizing program.
|
|
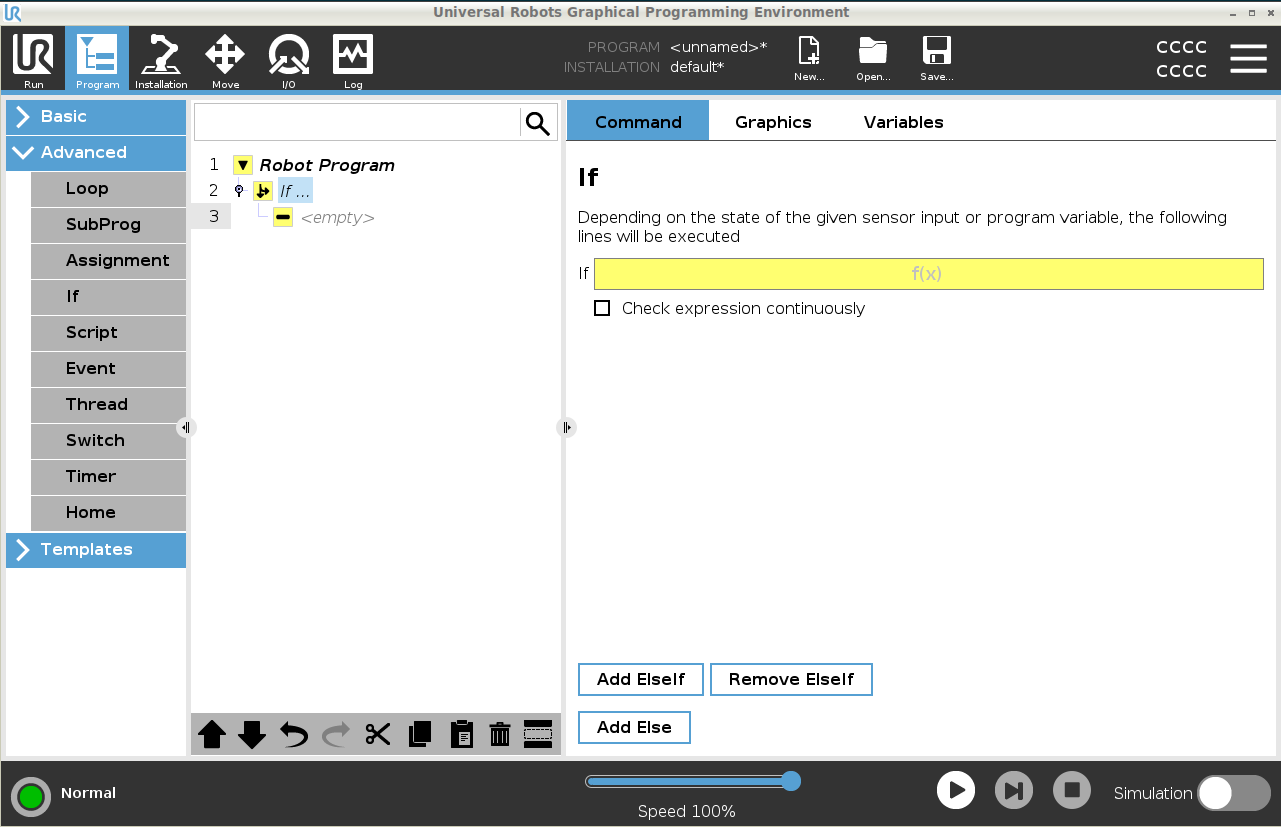
If |
Allows you the option to add "If", "Else" and "ElseIf" conditions to a robot program.
|
| Example |
You can use the If command to create two different results for a robot program.
|