Safe Home Position
| Description |
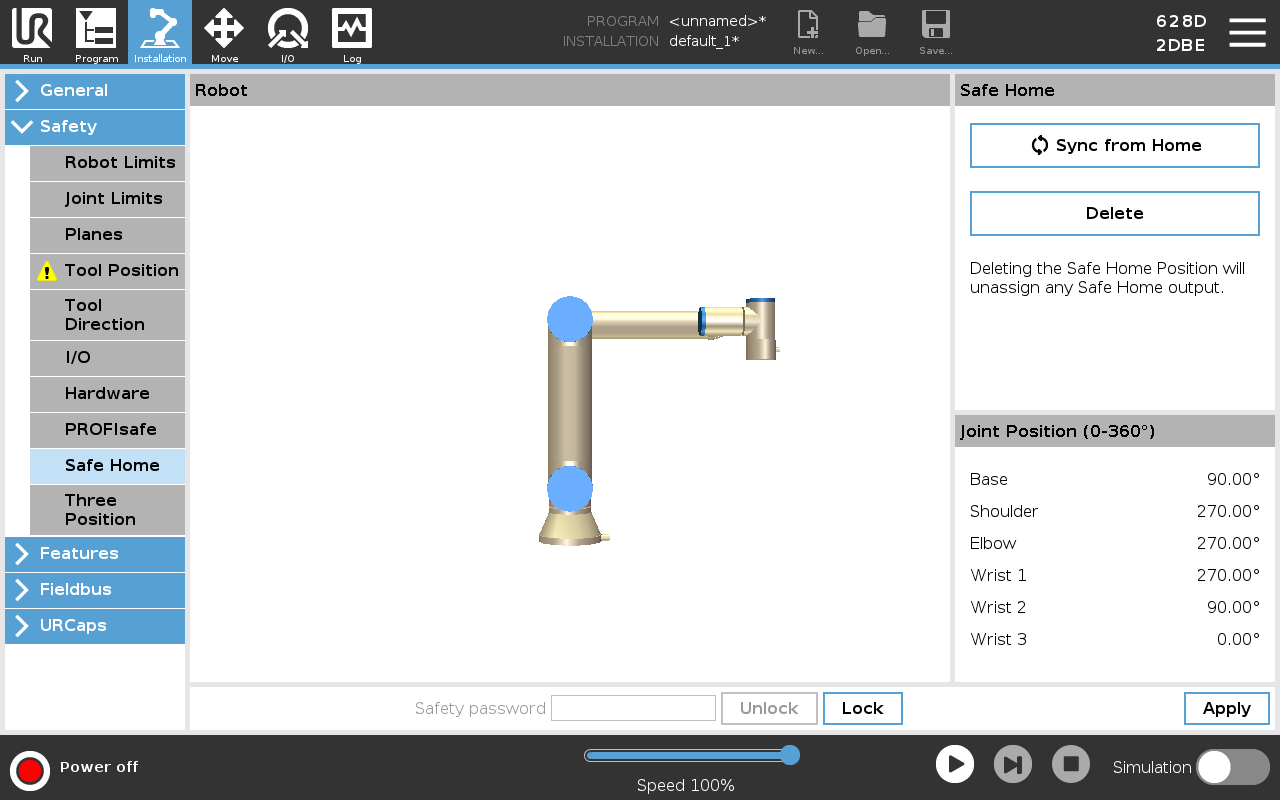
Safe Home is a return position defined by using the user-defined Home Position. Safe Home I/Os are active when the Robot Arm is in the Safe Home Position and a Safe Home I/O is defined. The Robot Arm is in the Safe Home Position if the joint positions are at the specified joint angles or a multiple of 360 degrees thereof. The Safe Home Safety Output is active when the robot is standing still at the Safe Home Position.
|
| Syncing from Home |
To sync from Home
|
| Safe Home Output |
The Safe Home Position must be defined before the Safe Home Output (see Safety I/O). |
| Defining Safe Home Output |
To define Safe Home Output
|
| Editing Safe Home |
To edit Safe Home Editing Home does not automatically modify a previously defined Safe Home position. While these values are out of sync, Home program node is undefined.
|