|
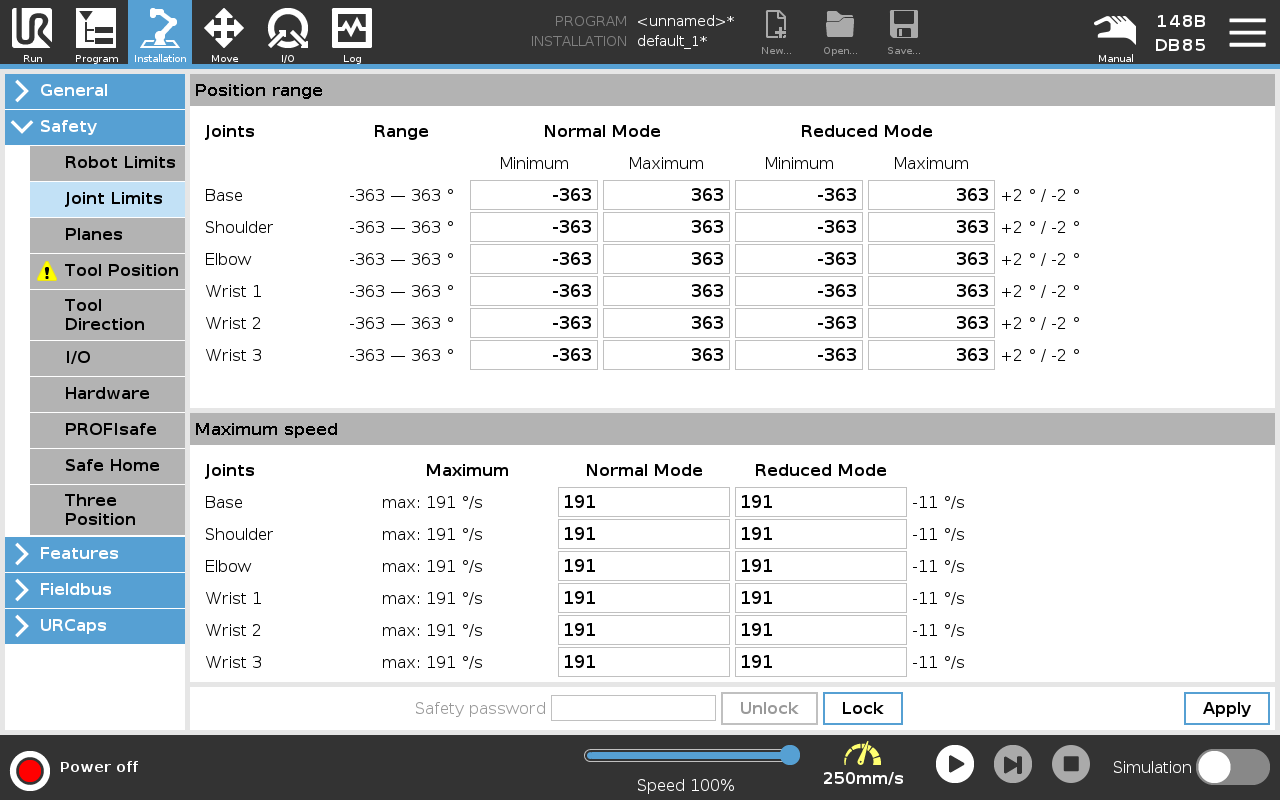
Joint limits allow you to restrict individual robot joint movements in joint space i.e. joint rotational position and joint rotational speed. Joint limiting can also be called software based axis limiting.
The joint limit options are: Maximum speed and Position range.
|