Safe Brake System
UR20 and UR30 robots will perform a procedure prior to powering off the motors during shutdown, violation or E-stop where it will detect whether or not the brake system in the robot arm engaged successfully.
In the event that it is detected that the brake system did not engage, then power to the joint motors will be kept on. The arm will be kept at standstill until an operator powers off the arm in a controlled way.
The robot will also perform this detection during when leaving backdrive, although in this case, it will keep the motors powered off.
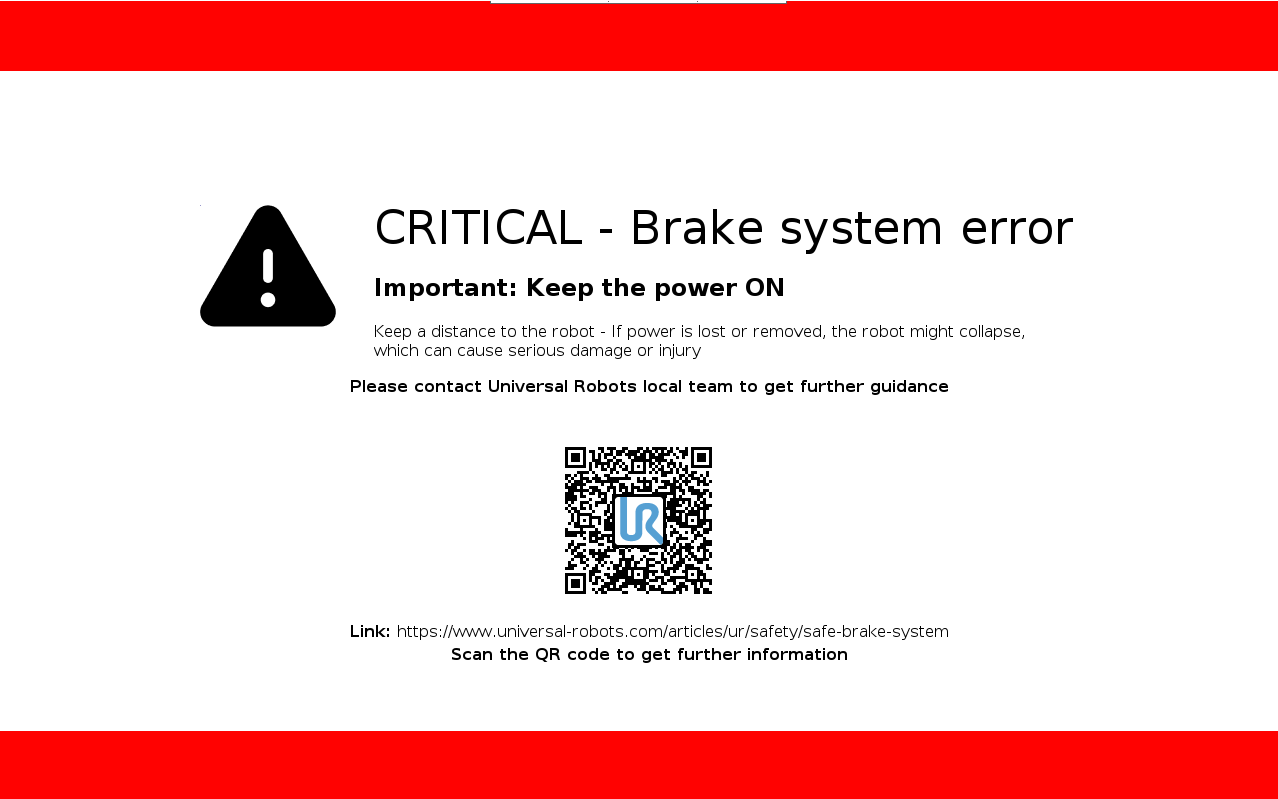
When the system enters this state, the following screen will appear in the PolyScope user interface:
Long-pressing the exclamation mark icon will bring up a special power off screen.