Safety I/O Signals
| Description |
The I/O are divided between inputs and outputs and are paired up so that each function provides a Category 3 PLd capability.
|
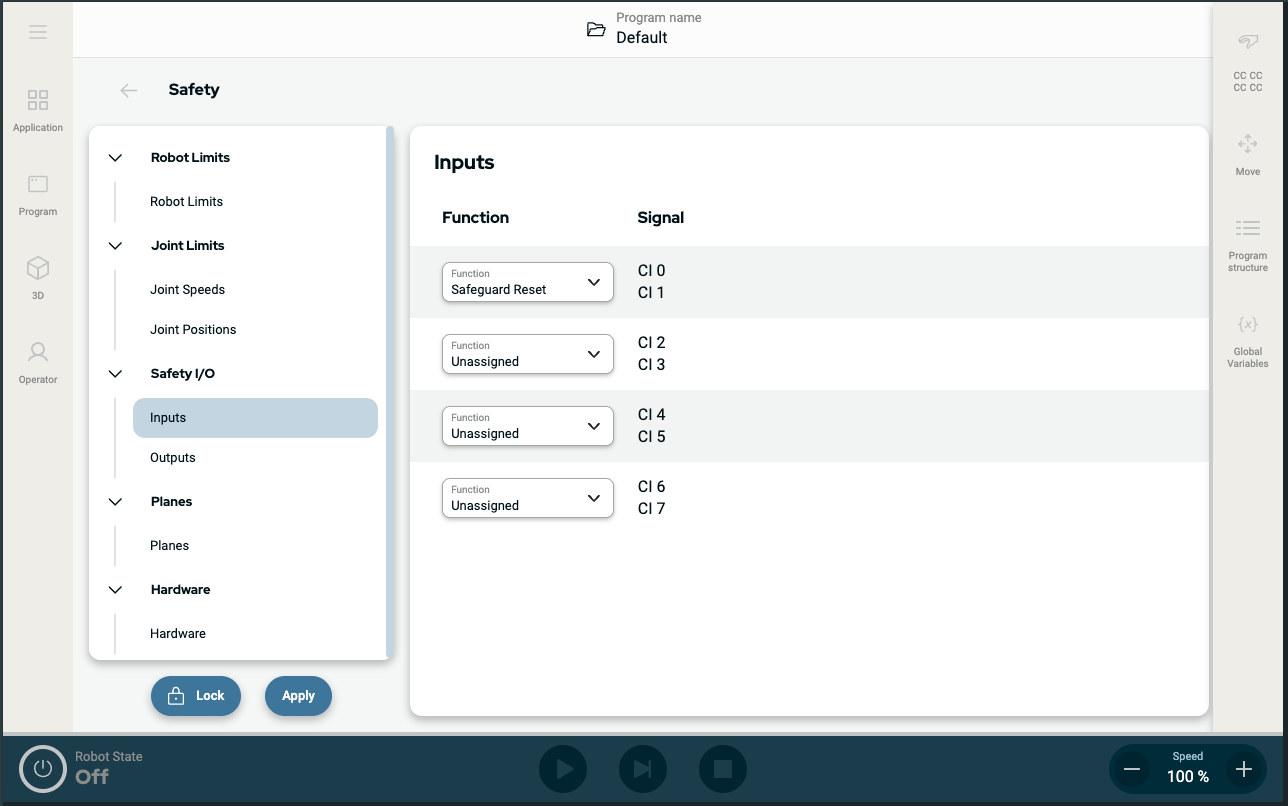
| Input Signals |
The inputs are described in the table below
When the default Safeguard Reset is disabled, an automatic reset happens when the safeguard no longer triggers a stop. This can happen if a person passes though the field of the safeguard. If a person is not detected by the safeguard and the person is exposed to hazards, automatic reset is forbidden by standards.
When Automatic Mode Safeguard stop is enabled, a safeguard Stop is not triggered in Manual Mode.
|
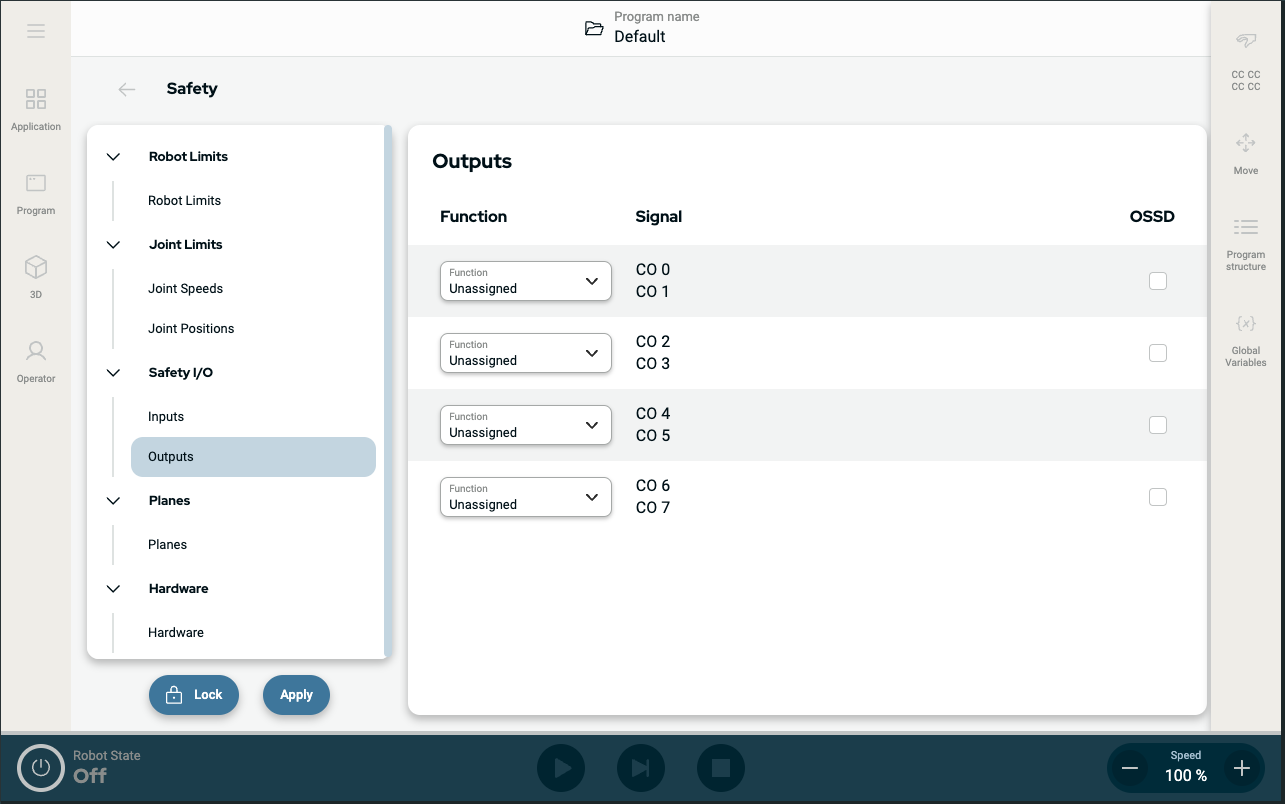
| Output Signals |
All safety outputs go low in the event of a safety system violation or fault. This means the System Stop output initiates a stop even when an E-stop is not triggered. You can use the following Safety functions output signals. All signals return to low when the state which triggered the high signal has ended:
Any external machinery receiving its Emergency Stop state from the robot through the System Stop output must comply with ISO 13850. This is particularly necessary in setups where the Robot Emergency Stop input is connected to an external Emergency Stop device. In such cases, the System Stop output becomes high when the external Emergency Stop device is released. This implies that the emergency stop state at the external machinery will be reset with no manual action needed from the robot’s operator. Hence, to comply with safety standards, the external machinery must require manual action in order to resume.
|