Singularity
| Description |
A singularity is a pose that restricts the motion and the ability to position the robot. The robot arm can stop moving or have very sudden and fast movements when approaching and leaving singularity. Make sure that robot motion near a singularity does not create hazards to anyone within the range of the robot arm, end effector, and workpiece.
The following causes singularity in the robot arm:
|
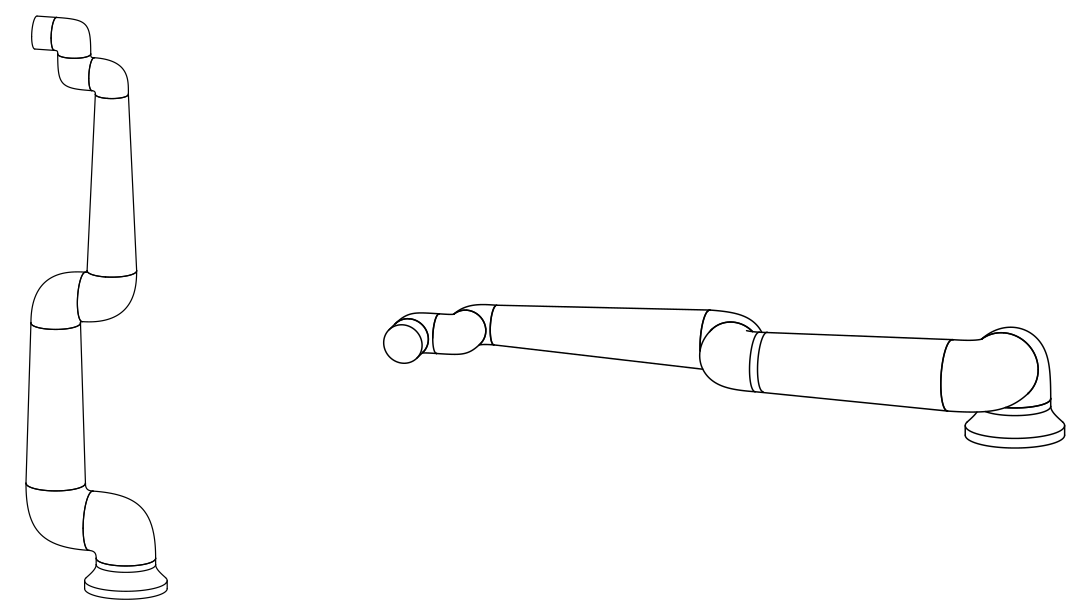
| Outer workspace limit
|
The singularity occurs because the robot cannot reach far enough or it reaches outside of the maximum working area.
To avoid: Arrange the equipment around the robot to avoid it reaching outside of the recommended workspace.
|
| Inner workspace limit
|
The singularity occurs because the movements are directly above or directly below the robot base. This causes many positions/orientations to be unreachable.
To avoid: Program the robot task in such a way that it is not necessary to work in or close to the central cylinder. You can also consider mounting the robot base on a horizontal surface to rotate the central cylinder from a vertical to horizontal orientation, potentially moving it away from the critical areas of the task.
|
| Wrist alignment
|
This singularity occurs because wrist joint 2 rotates on the same plane as the shoulder, elbow and wrist joint 1. This limits the range of movement of the robot arm, regardless of workspace.
To avoid:Layout the robot task in such a way that it is not necessary to align the robot wrist joints in this manner. You can also offset the direction of the tool, so that the tool can point horizontally without the problematic wrist alignment.
|