|
You can avoid pinching hazards by removing obstacles in these areas, by placing the robot differently, or by using a
combination of safety planes and joint limits to eliminate the hazards by preventing the robot moving into this area of its workspace.
Placing the robot in certain areas can create pinching hazards that can lead to injury.
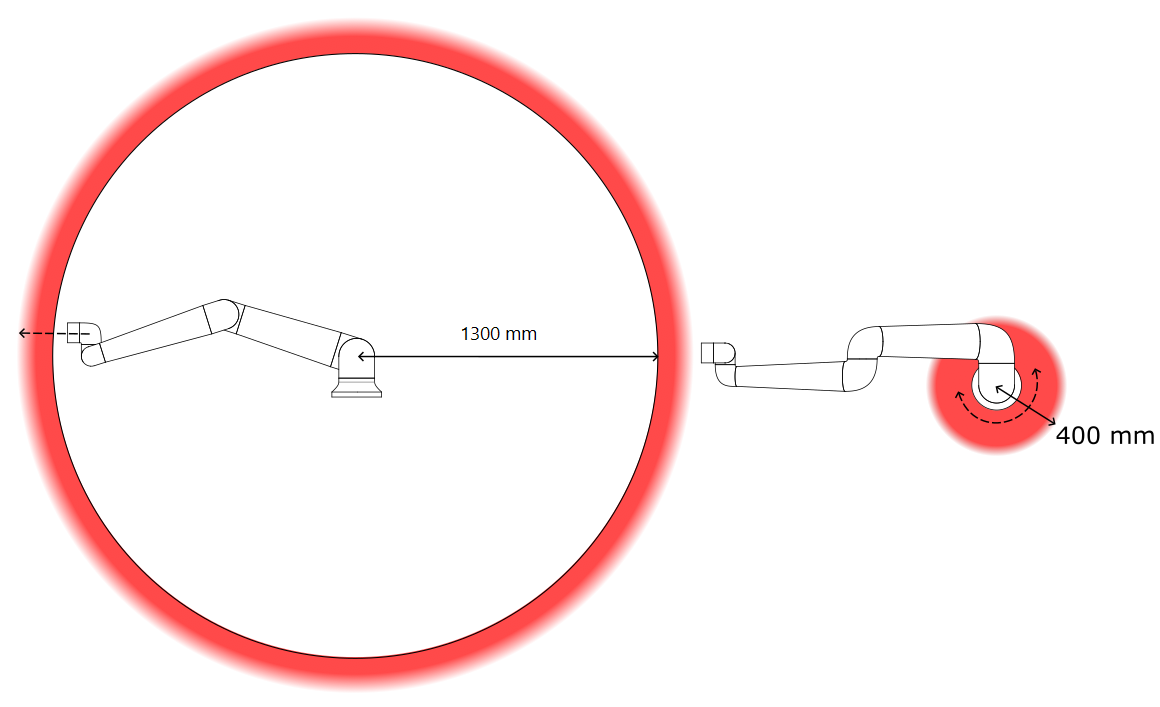
Due to the physical properties of the robot arm, certain workspace areas require attention regarding pinching hazards.
One area (left) is defined for radial motions when the wrist 1 joint is at least 1650 mm from the base of the robot.
The other area (right) is within 400 mm of the base of the robot, when moving tangentially.
|