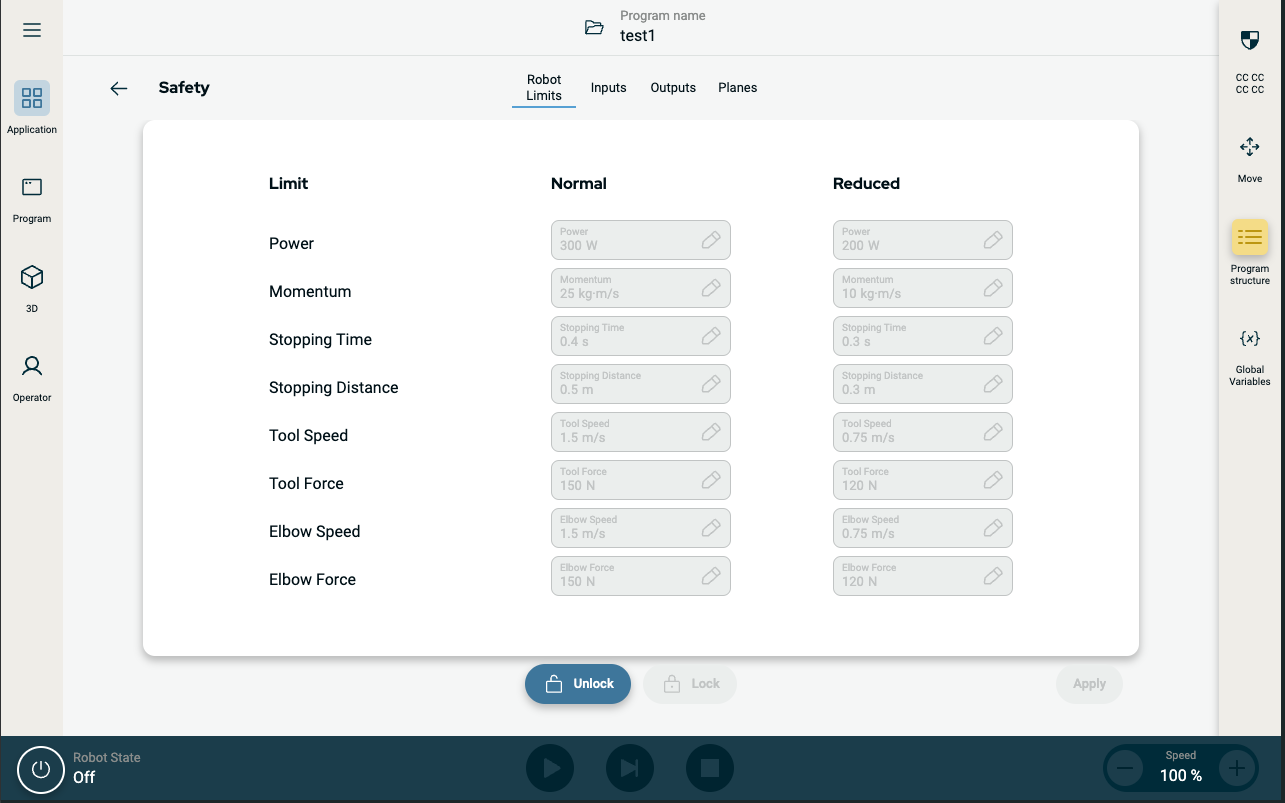
Robot Limits
| Limit | Description |
|
Power |
limits maximum mechanical work produced by the robot in the environment. This limit considers the payload a part of the robot and not of the environment. |
|
Momentum |
limits maximum robot momentum. |
|
Stopping Time |
limits maximum time it takes the robot to stop e.g. when an emergency stop is activated |
|
Stopping Distance |
limits maximum distance the robot tool or elbow can travel while stopping. |
|
Tool Speed |
limits maximum robot tool speed. |
|
Tool Force |
limits the maximum force exerted by the robot tool in clamping situations |
|
Elbow Speed |
limits maximum robot elbow speed |
| Elbow Force | limits maximum force that the elbow exerts on the environment |
Restricting stopping time and distance affect overall robot speed. For example, if stopping time is set to 300 ms, the maximum robot speed is limited allowing the robot to stop within 300 ms.
The tool speed and force are limited at the tool flange and the center of the two user-defined tool positions
Under normal conditions, i.e. when no Robot stop is in effect, the safety system operates in a Safety Mode associated with a set of safety limits 1: