Safety I/O Signals
The I/O are divided between inputs and outputs and are paired up so that each function provides a Category 3 and PLd I/O.
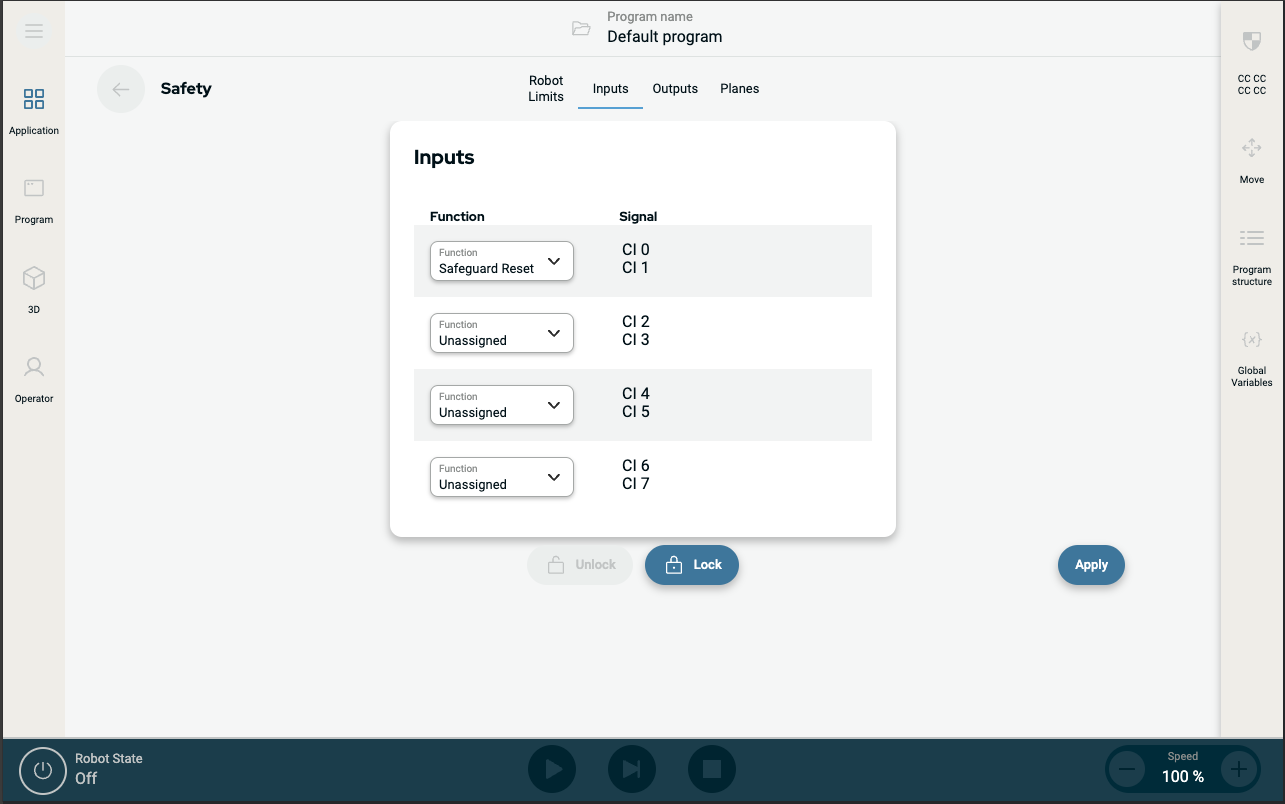
Figure 1.3: PolyScope X screen displaying the Inpu signals.
The safety functions listed in the table below can be used with the input signals
|
System Emergency Stop
|
This is an emergency stop button alternative to the one on the Teach Pendant, providing the same functionality if the device complies with ISO 13850.
|
|
Reduced Mode
|
All safety limits can be applied in either Normal mode or Reduced mode. When configured, a low signal sent to the inputs causes the safety system to transition to Reduced mode. The robot arm decelerates to satisfy the Reduced mode limit set. The safety system guarantees that the robot is within Reduced mode limits less than 0.5s after the input is triggered. If the robot arm continues to violate any of the Reduced mode limits, it performs a Stop Category 0. Transition to Normal mode occurs in the same way. The trigger planes can also cause a transition to Reduced mode.
|
| Safeguard Reset |
When a Safeguard Stop occurs, this output ensures that the Safeguard Stop state continues until a reset is triggered. |
Disabling the default Safeguard Reset input deactivates the Safeguard Stop when the input is high. As a result any program that was paused using the Safeguard Stop will resume. This renders the robot arm unsafe.
|
System Emergency Stop
|
Signal is Low when the safety system has been triggered into an Emergency Stopped state by the Robot Emergency Stop input or the Emergency Stop Button. To avoid deadlocks, if the Emergency Stopped state is triggered by the System Emergency Stop input, low signal will not be given.
|
|
Robot Moving
|
Signal is Low if the robot is moving, otherwise high.
|
|
Robot Not Stopping
|
Signal is High when the robot is stopped or in the process of stopping due to an emergency stop or safeguard stop. Otherwise it will be logic low.
|
|
Reduced Mode
|
Signal is Low when the robot arm is placed in Reduced mode or if the safety input is configured with a Reduced Mode input and the signal is currently low. Otherwise the signal is high.
|