First Boot
| Description |
The first boot is the initial sequence of actions you can take with the robot after assembly. This initial sequence requires you to:
|
|
Failure to verify the payload and installation before starting up the robot arm can lead to injury to personnel and/or property damage.
Incorrect payload and installation settings prevent the robot arm and Control Box from functioning correctly.
Starting up the robot in low temperatures can result in lower performance, or stops, due to temperature-dependent oil and grease viscosity.
|
Powering On the Robot
| To power on the robot |
Powering on the robot turns on the Control Box and loads the display on the TP screen.
|
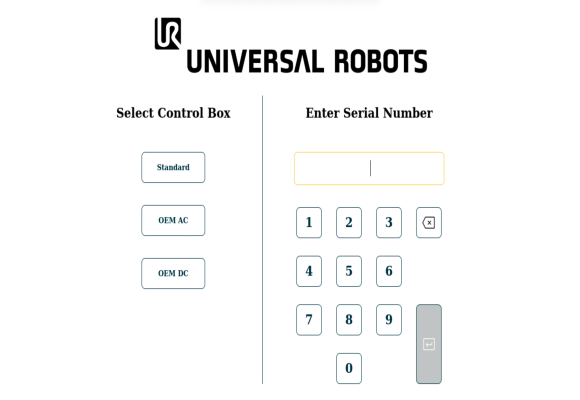
Inserting the Serial Number
| To insert the serial number |
Installing your robot for the first time requires you to enter the serial number on the robot arm. This procedure is also required when you re-install the software. For example, when you install a software update. |
|
|
It can take a few minutes for the start screen to load.
|
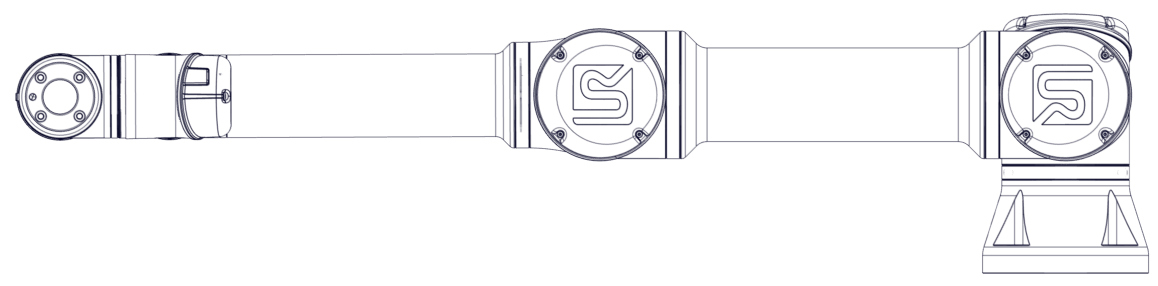
Verifying the Installation
| Verify robot mounting |
Mounting settings describe whether the robot is mounted vertically, horizontally, or at an angle. This allows the robot to determine the direction of gravity, enabling smooth and precise movement. This screen also allows you to specify the orientation of the robot base in relation to the viewer, giving the robot an accurate appearance in the visualizations. |
|
|
Always verify the actual payload and installation are correct before starting up the robot arm. If these settings are incorrect, the robot arm and Control Box will not function correctly and may become dangerous to people or equipment. Ensure the robot arm is not touching an object (e.g., a table) because a collision between the robot arm and an obstacle might damage a joint gearbox. |
|
|
To change the mounting settings of the robot arm:
|

|

| Verify active payload |
Starting the robot arm disengages the braking system, allowing you to start moving the robot arm and to start using PolyScope X. Before powering on the robot arm, you need to verify that the correct active payload is configured.
You can now Unlock the brakes and start moving the robot arm. |


Starting the Robot Arm
| To start the robot |
Starting the robot arm disengages the braking system, allowing you to start moving the robot arm and to start using PolyScope X.
|

|

Testing Mount and Payload using Freedrive
|
Description |
Freedriving the robot allows quickly check if the robot is functioning normally and mounting settings and payload are correctly specified. Detailed description of the Freedrive could be found in the Freedrive section. |
||||
| To test Freedrive |
|

Powering Down the Robot
| To power down the robot arm |
Unexpected startup and/or movement can lead to injury.
You can now:
|