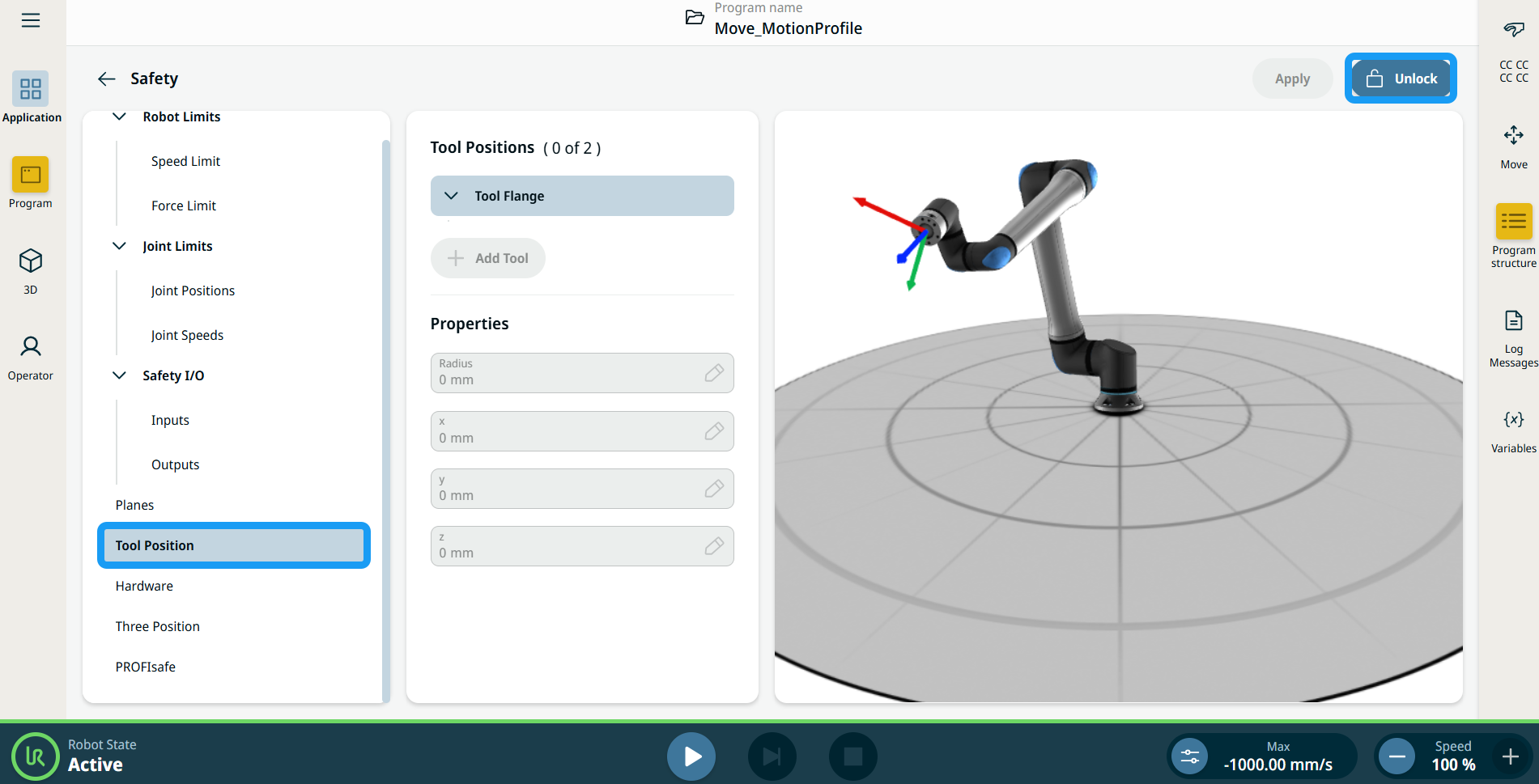
Tool Position Restriction
| Details |
Tool Position has two key benefits:
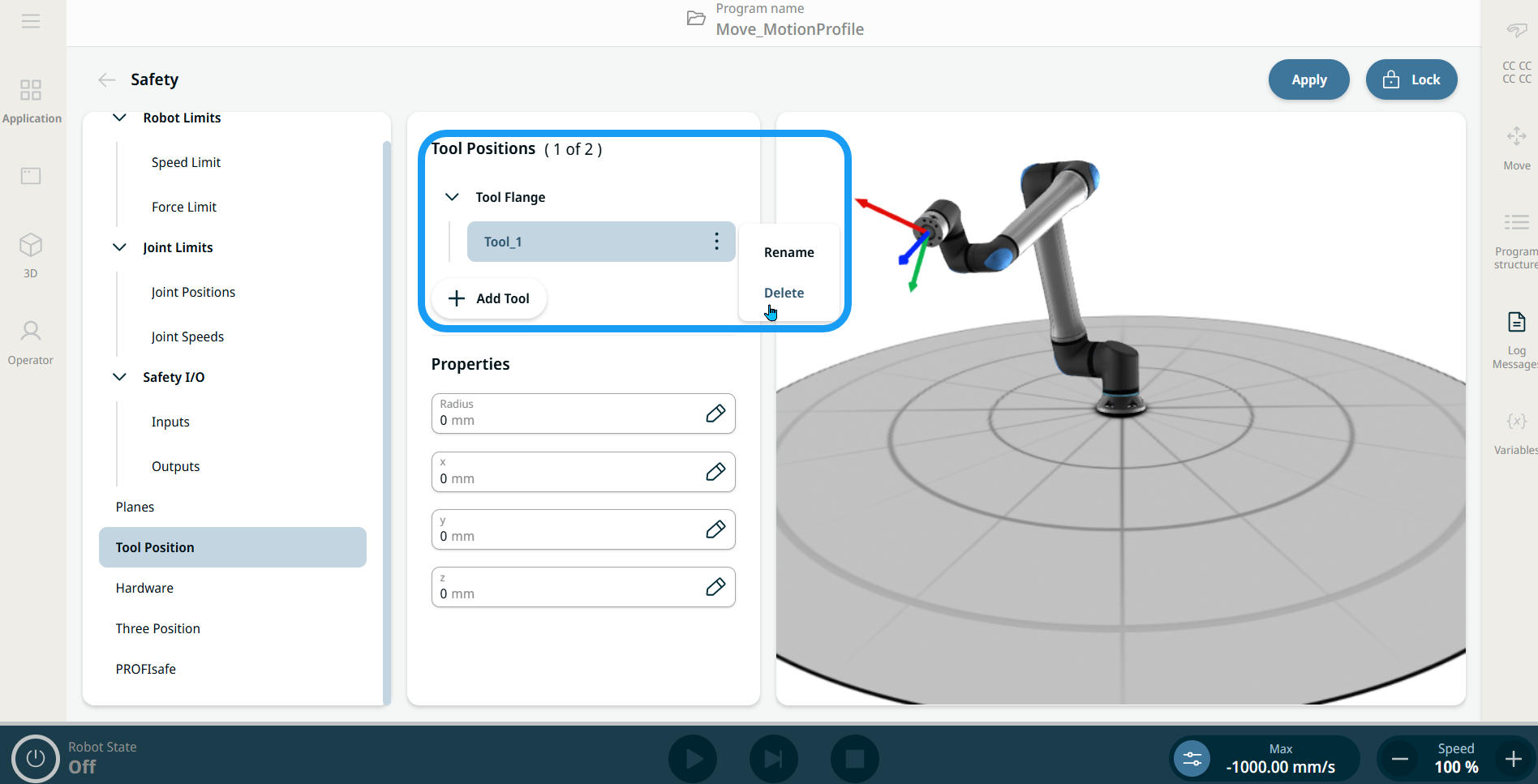
You can define, configure, and manage up to two tool positions.
|
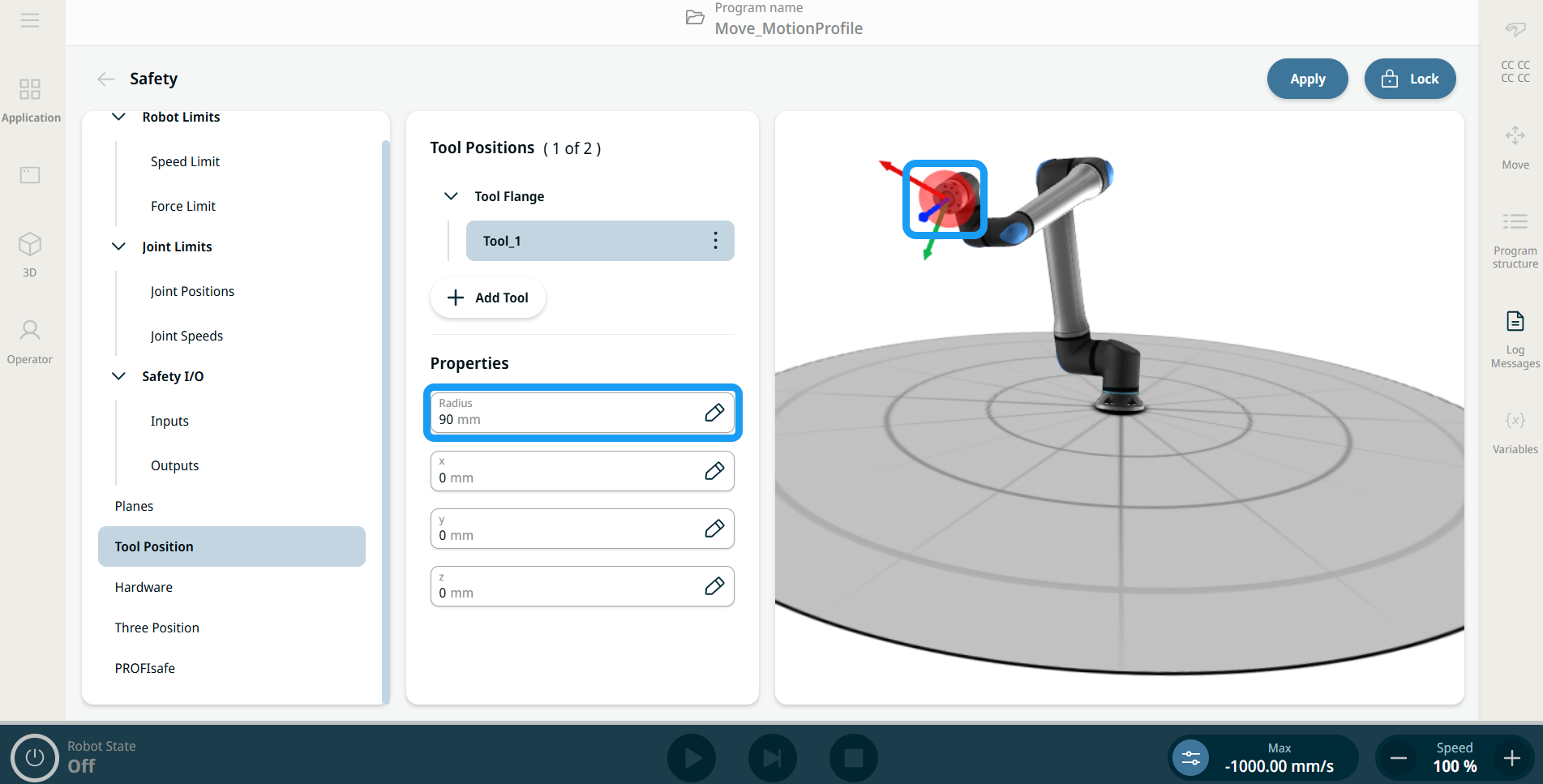
| User defined tools |
For the user defined tools, the user can change:
|
|
To access Tool Position |
|
|
|
|
|
|
|