Smart Skills Application
| Description |
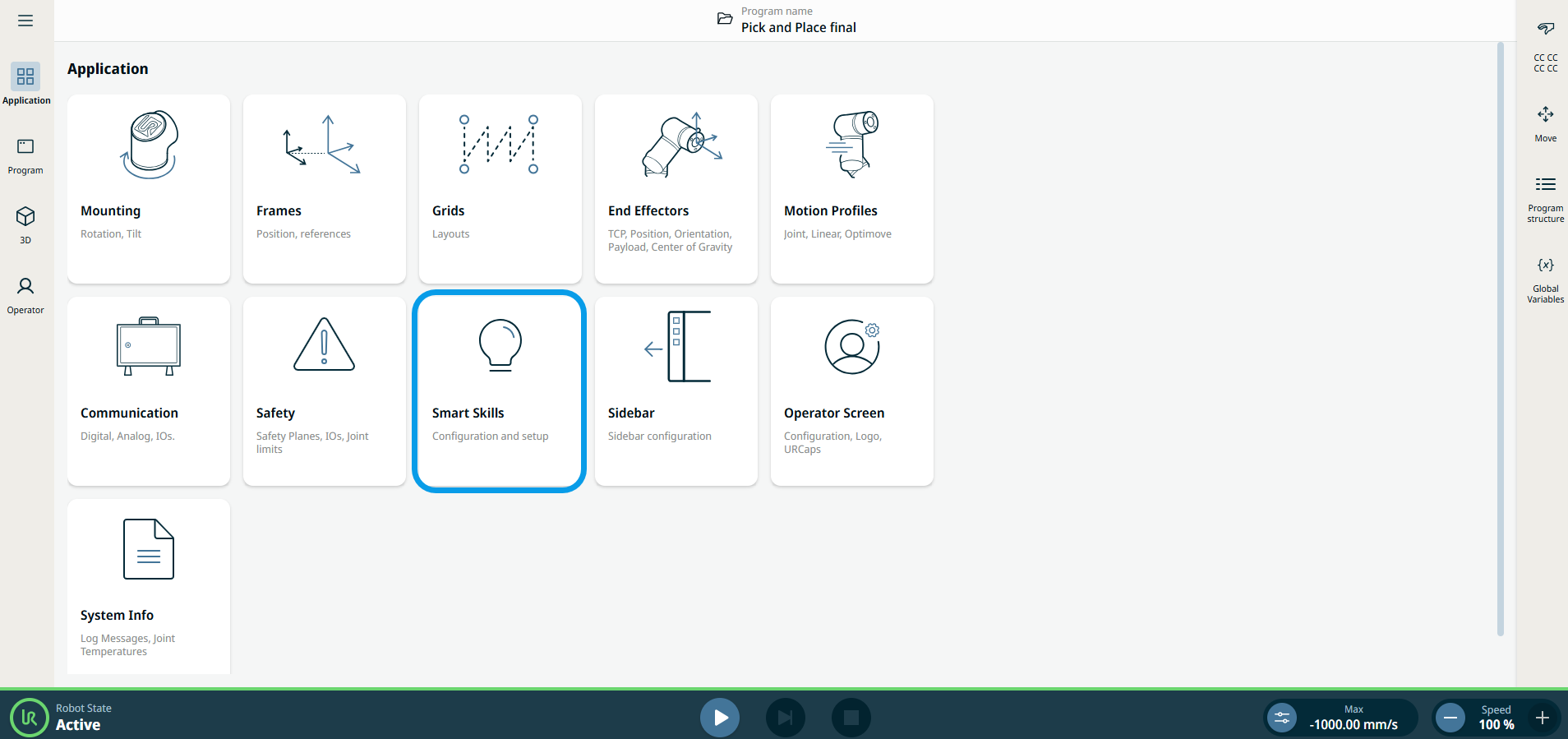
All Smart Skills are parametrized, which enables you to configure and set up the Smart Skills in the Application tab.
|
|
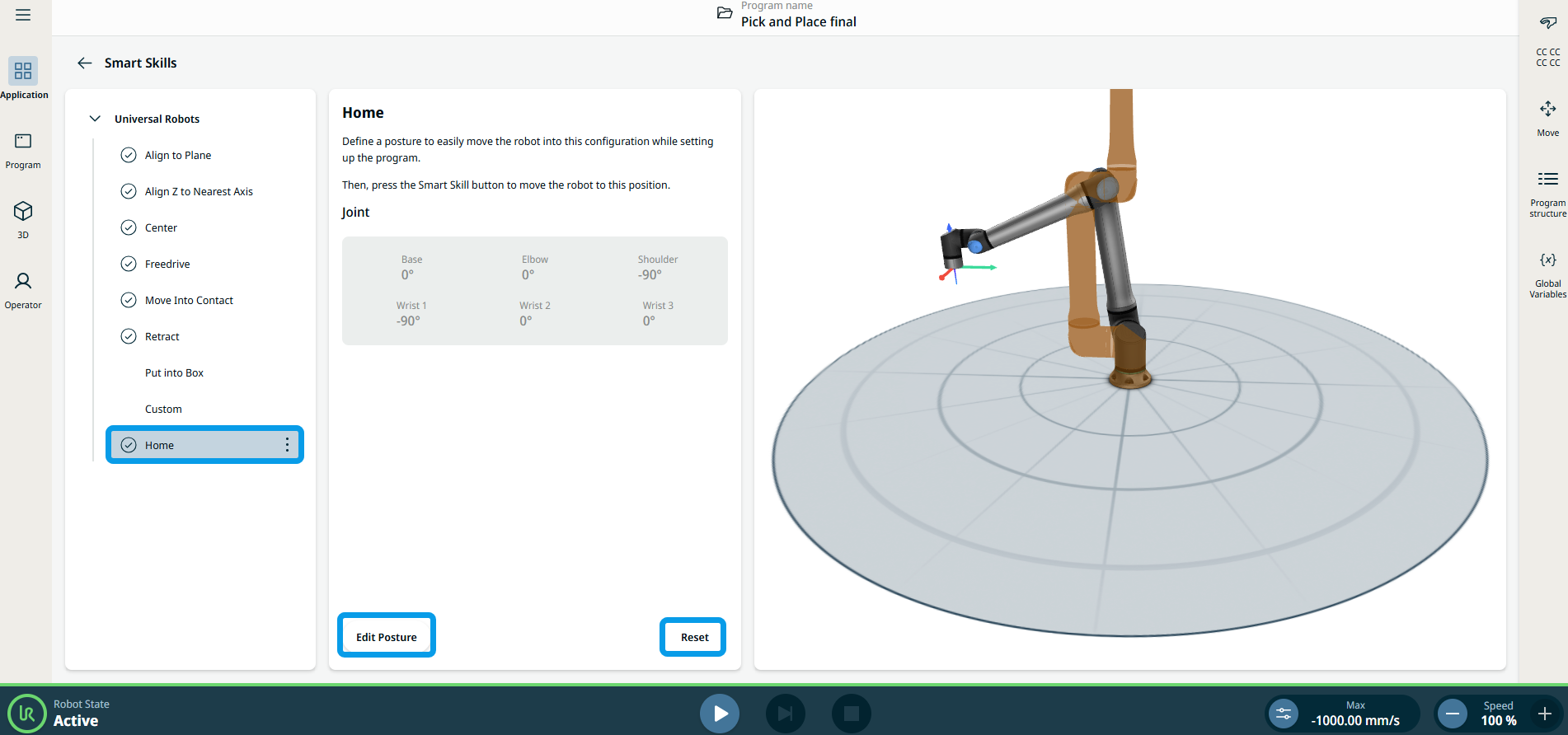
Using the Smart Skills application functionality |
|
|
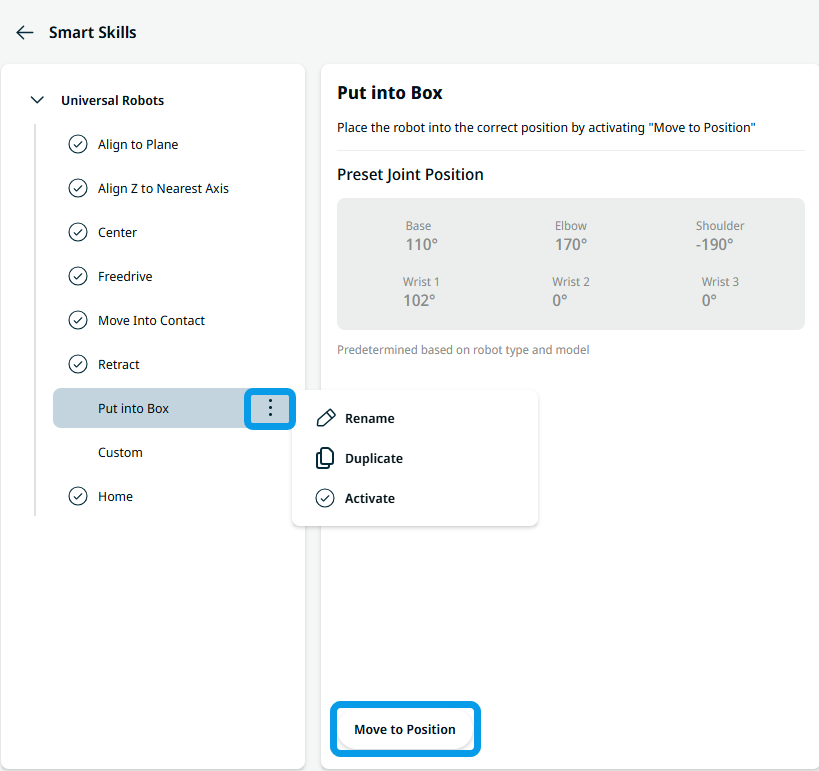
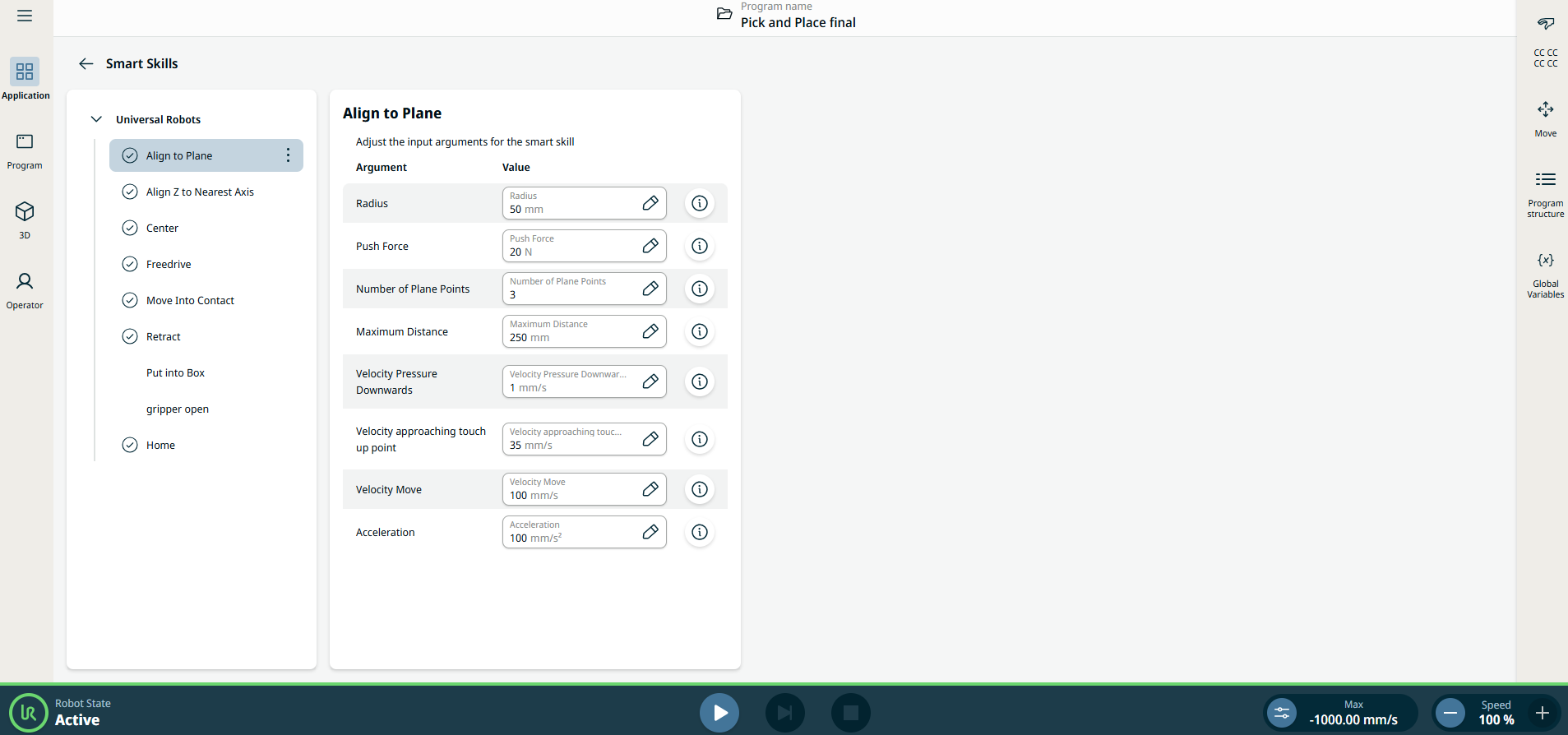
Smart Skill Input Argument |
Each Smart Skill has a couple of parameters it uses when it executes. These can be changed to fit the application that you are running, whether or not it fits the default values.
These are the input arguments of the smart skills where you can change the value:
|
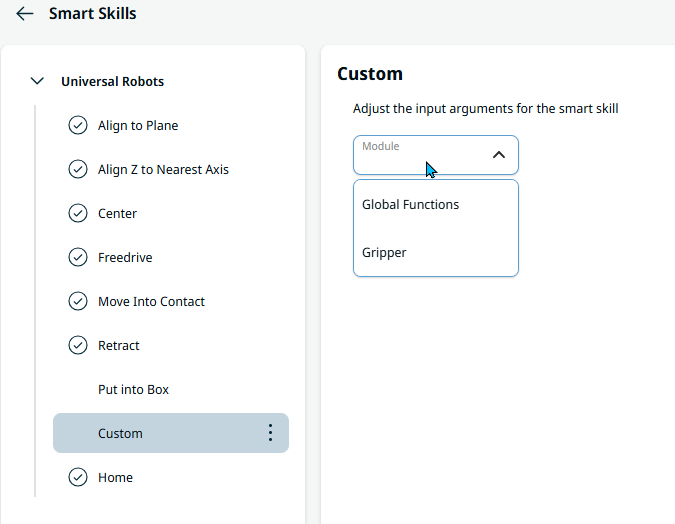
| Smart Skills with different adjustments |
|
|
|
|