Communication
| Description |
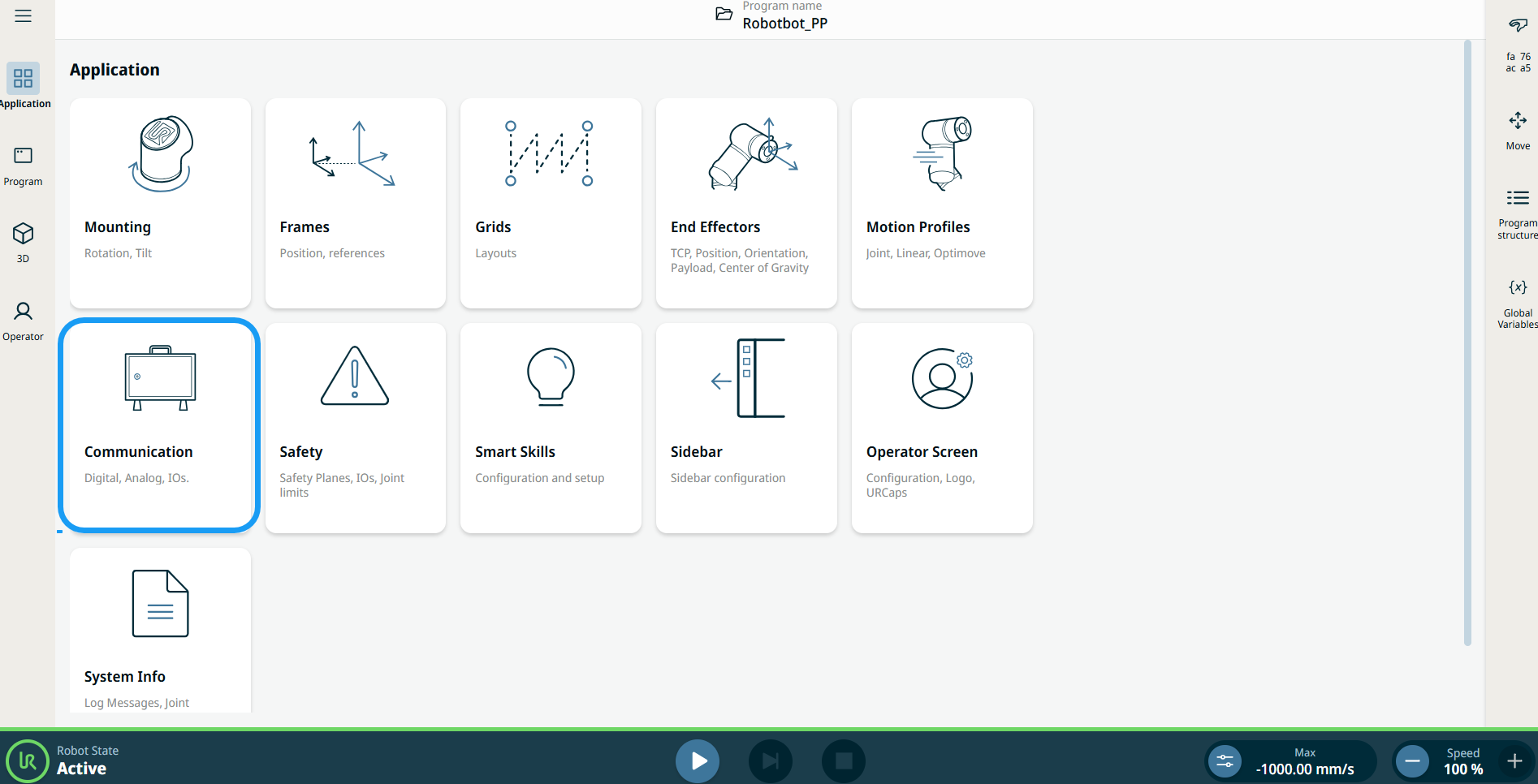
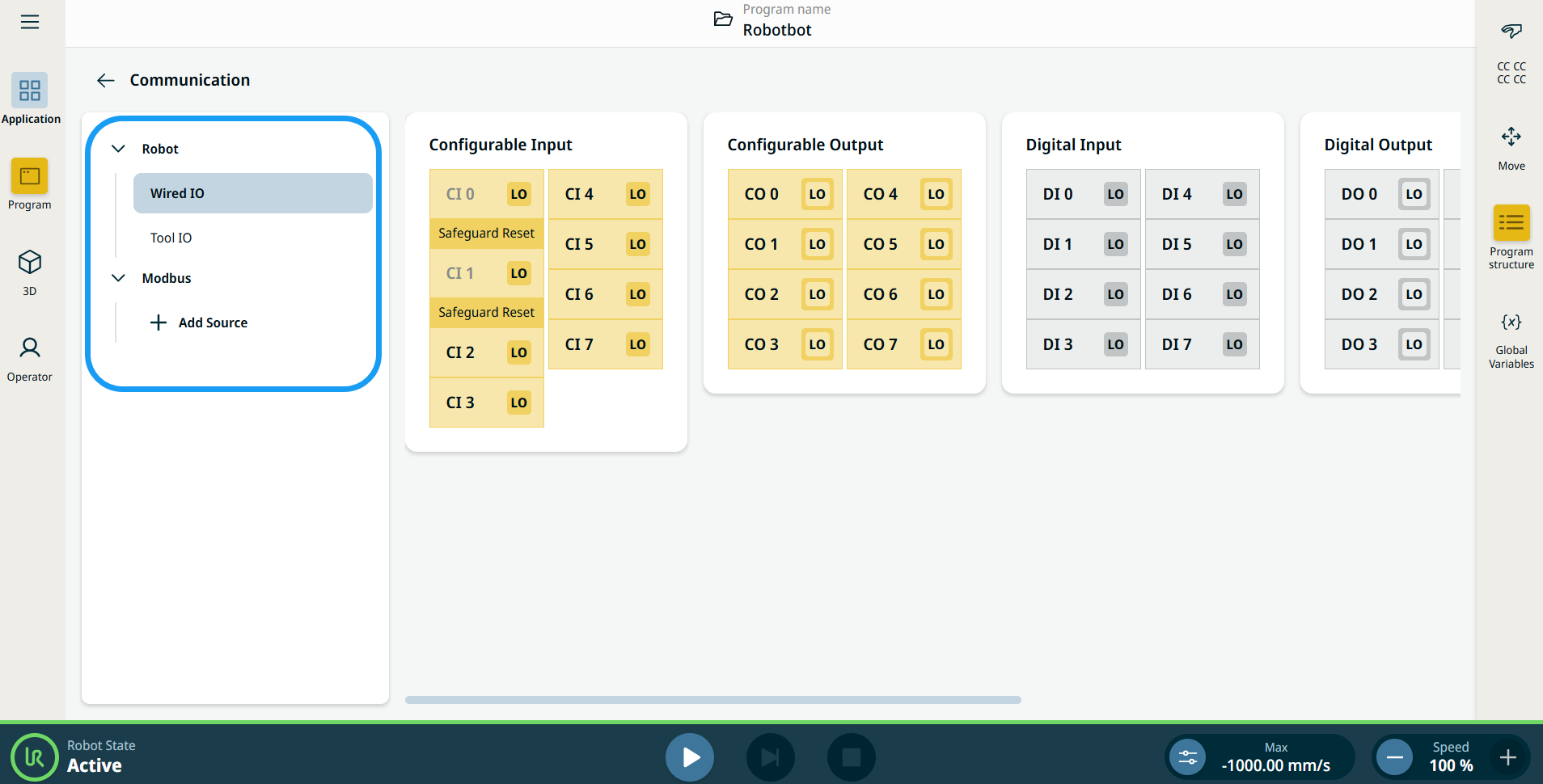
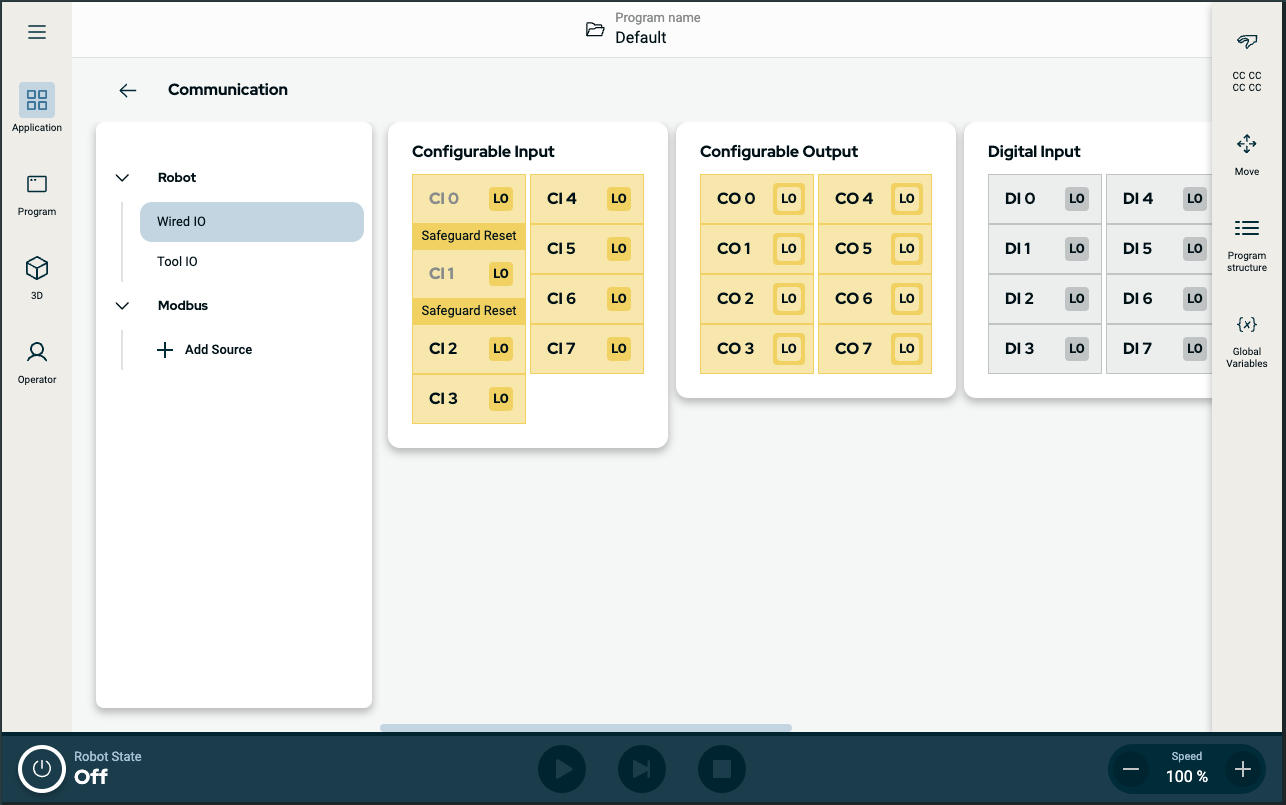
The Communication application allows you to monitor and set the live IO (input-output) signals from/to the robot control box.
|
|
Using the Communication application functionality |
|