Payload and Center of Gravity
| Description |
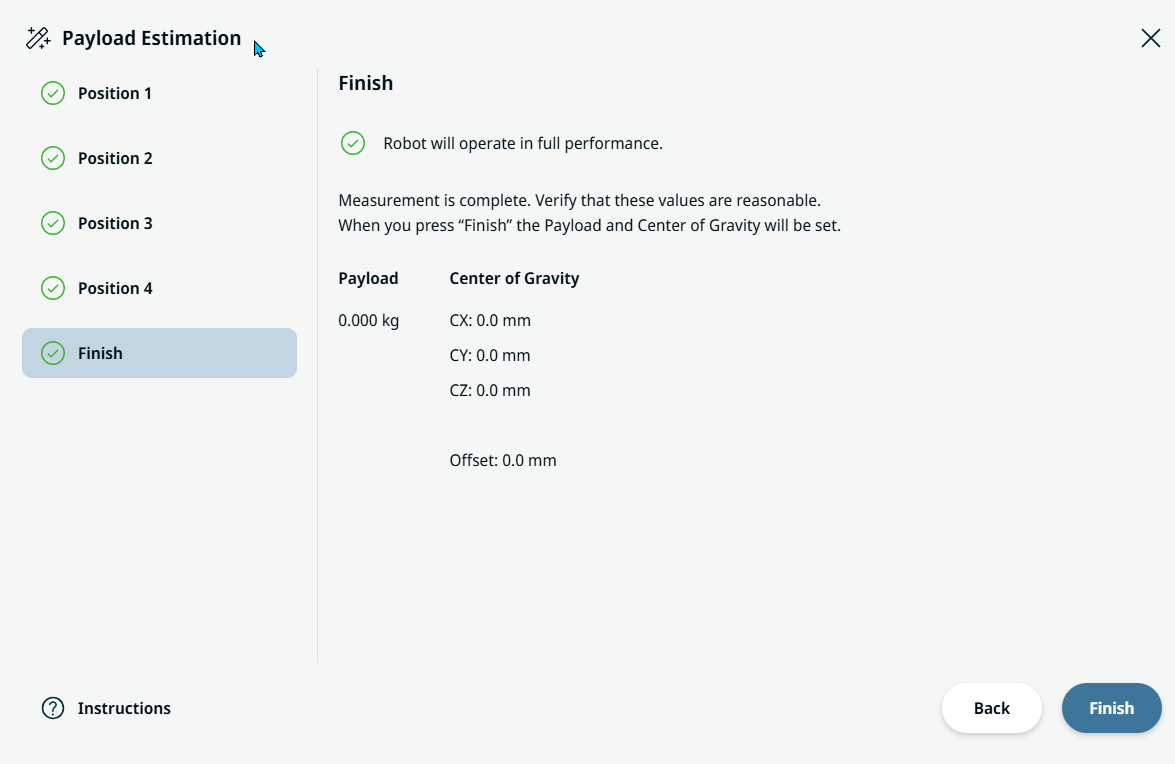
The new Payload Estimation wizard allows the robot to help the user set the correct payload and center of gravity (CoG) of a work piece, such as a tool or a combination of attachments to the tool flange.
|
| Payload and Center of Gravity (CoG) wizard |
|
|
|
As in the TCP position wizard, the user will be informed, if positions need to be re-taught, because the taught positions are not sufficiently diverse. A pop-up with instructions can be opened at any time as in the TCP wizards. Follow the these guidelines for best Payload Estimation results:
|
 , and the pop-up Payload Estimation screen appears.
, and the pop-up Payload Estimation screen appears.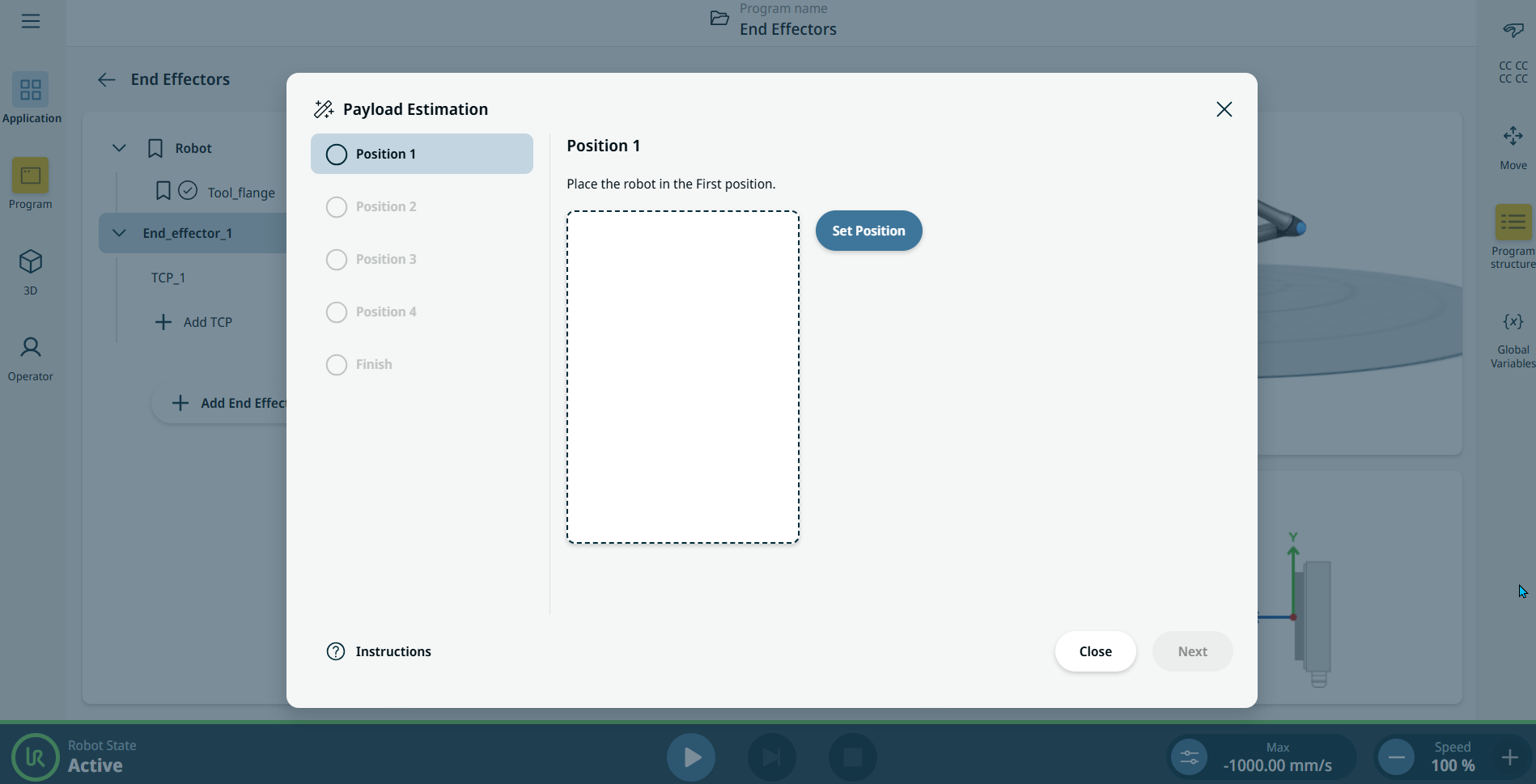
| Renaming, Duplicating, and Deleting Payloads |
You can start configuring a new Payload with the following actions:
|
 to rename a Payload.
to rename a Payload. to duplicate a Payload.
to duplicate a Payload. to delete a selected Payload. You cannot remove the last Payload.
to delete a selected Payload. You cannot remove the last Payload.