Robot Arm
| About the robot arm |
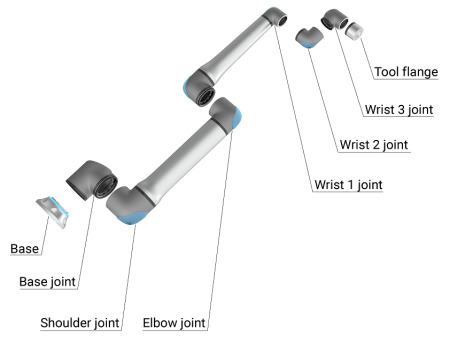
The Joints, Base and Tool Flange are the main components of the robot arm. The controller coordinates joint motion to move the robot arm.
Attaching an end effector (tool) to the Tool Flange at the end of the robot arm, allows the robot to manipulate a workpiece. Some tools have a specific purpose beyond manipulating a part, for example, QC inspection, applying adhesives and welding.
|
|
The robot is partly completed machinery, as such a Declaration of Incorporation is provided. A risk assessment is required for each robot application.
|