

UR AI Trainer、登場

現場で実績ある協働ロボットでのAIトレーニング
多くのAIモデルが実運用に至らない理由は、アルゴリズムではなく「学習環境」にあります。
軽量な研究用ロボットや視覚情報のみのシステムで学習したモデルは、接触や力加減、相互作用といった現実の作業に必要な要素を十分に学習できません。
そのため、産業用ロボットに適用した際に性能が発揮できないケースが多く見られます。
URのAI Trainerは、この課題を根本から解決するために開発されました。

力のかけ具合も学習
内蔵の力覚センサとダイレクトトルク制御により、「見た目」や「軌道」だけでなく、「接触時の感覚」まで含めた学習が可能です。

実機に基づく学習・運動制御
実際の生産現場で使用されるロボットで学習を実施。正確な運動学・調整済みの動特性・安定した制御により、実運用と同じ物理条件を再現します。

現場適応を前提とした設計
世界で10万台以上の導入実績を持つURロボットをベースに、長時間の実験、再現性の高い検証、そして「ラボから工場へ」のスムーズな移行を実現します。
Anders Billesø Beck(ユニバーサルロボット AI Robotics Products担当VP)AI Trainerにより、AI開発チームは ”収集したデータがそのまま現場で通用する” という前提のもと、モデル開発に集中できます。また、現場側でも用途に即したデータを収集し、実運用に適したモデルの微調整が可能になります。
本システムで実現できること

高精度な作業データ収集
動作軌道だけでなく、接触・力のかかり方・相互作用を含む実作業データを取得。

VLAモデルの学習
Vision-Language-Actionモデルの学習およびファインチューニングに適したデータセットを生成。

ラボから工場への一貫性
実際に導入するロボットと同じ環境で学習することで、シミュレーションと実機のギャップを最小化。
システム構成
人によるデモンストレーション
- 作業者がリーダーロボットを操作し実作業を再現
- フォロワーロボットが動作をリアルタイムで追従
- 再現性の高いデータ取得が可能

制御・インタラクション
- 超低遅延による高精度制御
- 力覚フィードバックによる接触の把握
- 長時間運用を考慮した操作性

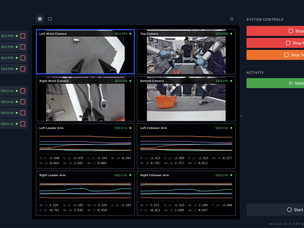
センシング・データ取得(Scale AIソフトウェア)
- 4系統のカメラ映像を同期取得
- ロボットの状態・動作・力データを同時収集
- すべての信号を時間同期したデータセット化
データ基盤
- UR AI Accelerator上で動作
- Scale AIのアノテーションおよび品質評価基盤と連携
含まれるもの

ユニバーサルロボットの協働ロボット
タスク教示および実行のためのリーダー/フォロワーロボット構成。

AI Accelerator
NVIDIA Jetson Orinを搭載したロボット内AI計算基盤。Orbbec 3Dビジョンにより高精度データ取得を実現。
Scale AIソフトウェア
模倣学習用のロボットデータを自動収集・管理する記録ソフトウェア。

Ventionプラットフォーム
Ventionと共同開発した、産業用途に対応するマルチロボット構成の架台。

Robotiqグリッパ
把持・搬送・接触を伴う作業に対応した実用レベルのグリッパ。

Scale AIソフトウェアによるデータ収集
Scale AIのソフトウェアにより、ユーザーはPhysical AI開発に必要な高品質なマルチモーダルデータをシームレスに取得できます。
UR AI Trainerで取得される各デモンストレーションでは、動作・力・視覚情報が同期された状態で記録され、VLAモデルの学習に必要な構造化データセットとして生成されます。
これにより、実機環境でのデータ収集をスケーラブルに拡張し、継続的なフィードバックループを通じてPhysical AIの開発と最適化を加速します。
また、ユニバーサルロボットとScale AIは、本システムを活用した大規模産業データセットを年内に公開予定です。
対象ユーザー
マニピュレーションやPhysical AIに取り組むAI・ロボティクス研究チーム 企業の先進R&D部門 AIモデルを開発するテクノロジーパートナー 学習ベースの自動化に取り組むシステムインテグレーター
AI Trainerに関する詳細はこちら
UR MarketplaceでUR AI Trainerの詳細をご確認いただくか、下記フォームよりお問い合わせください。
お問い合わせはこちら
ご関心のある方は以下フォームからお知らせください。別途担当者よりご連絡いたします。