
Vision system with the robot
An example of combining UR robot with vision system
Examples are valid for:
CB2 Software version: 1.8.16941
CB3 Software version: 3.1.17779
e-Series Software version: All versions
Note that older or newer software versions may behave differently.
These examples can be used for both CB2, CB3 and e-Series.
This is how-to is classified Expert. For a simple example, see this article.
Using vision with the robots should only be done with high experience, experts only.
This example show how to combine our robot with vision system. The robot will accept four double value of X,Y,R,P(X and Y means the pixel coordinate value of target object from camera, and R means the rotation degree of target object, and P means the match percent of target object)
Please read the comments in the program for more info.
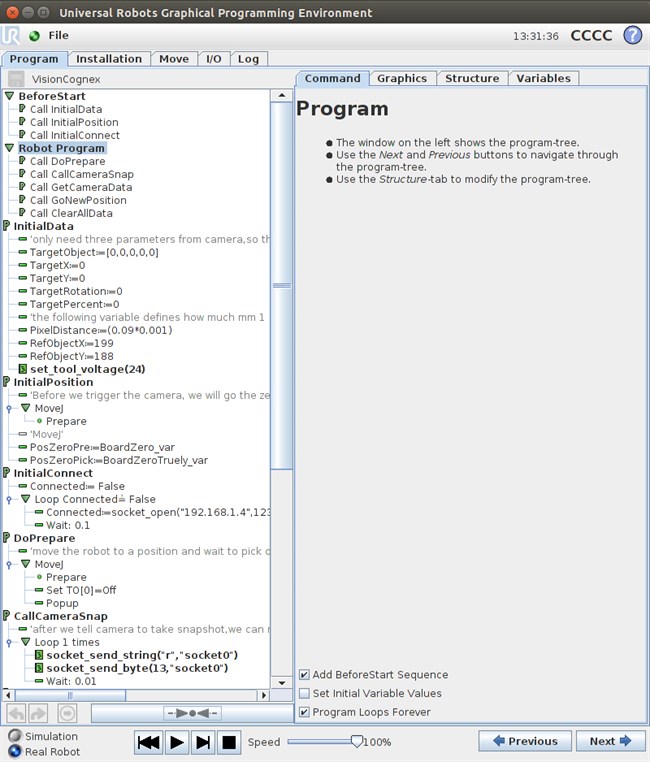
This sample program can also be used to combine with other vision system as long as it support TCP/IP protocol.
Check below the Polyscope .urp program for download