
Start program from where it was stopped
Demonstrates how to make a program that will start from the program section where the program was stopped.
Examples are valid for:
CB3 Software version: 3.1.17336
e-Series Software version: All versions
Note that older or newer software versions may behave differently.
In order to start the program from where it was previously stopped, the program should be split into sections; e.g. a section for picking up a part, and a section for placing a part.
Below photo shows an example of one possibility to start program from where is was stopped e.g. the day before.
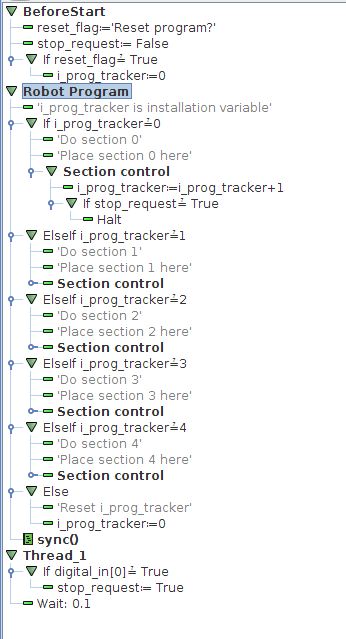
The robot program is divided into a number of sections, in above case 5 sections (0-4). Inside each of these sections, the normal robot program should be placed. An installation variable called “i_prog_tracker” is used to keep track of how far the program has gotten. The reason of using an installation variable, is that it keeps the value even after a reboot of the robot.
In the “section control” folder, the i_prog_tracker variable is increased, as the section is now finished.
A thread is monitoring a digital input, if this Is pressed, a variable “stop_request” is set to true, which makes the program stop/halt after one section is complete.
In the BeforeStart sequence, the operator is asked whether the robot should start from beginning or begin from the section after the last one that was finished.
It should however be noted, that variables that are not installation variables does not sustain their value after a reboot. Therefore variable values that should sustain their value, should be made as installation variables. In e.g. palletizing, the box “Remember traversal position between runs” should be ticked, in order for the robot to remember last position that was palletized from.
If it is desired, to be able to control the robot sections to be run externally, please refer to the how-to Remote Control Via TCP/IP