
Remote TCP Example: Sheet Metal Deburring
This article describes an example setup using the Remote TCP URCap in Polyscope 5.4 for a deburring task.
Example is valid for:
e-Series Software version: 5.4.0.76181
Note that older or newer software versions may behave differently.
This example can be used for e-Series only. Program files are available for download at the bottom of the page.
In this RTCP example, we will be setting up to debur flashing from the bottom edges of a sheet metal part after being cut using a laser process. Figures 1 and 2 show the workpiece condition before and after deburring.
Figure 1: Before deburring:

Figure 2: After deburring:

Figure 3: Our example setup:

First, let’s consider the task at hand and our workspace requirements. These basic concerns will apply to any RTCP application.
Setup items to be considered:
Robot and remote tool mechanics
- Does the robot have enough joint travel and reach to perform the task?
Example: You a deburring the entire perimeter of a part requiring 360 degrees of rotation plus an overlap. Make sure you have this movement available to you before starting the RTCP procedures.
- Is the robot best positioned for the task?
You will need to plan for remote tool location, pick location, place location, part size, shape and any clearance requirements. Keep in mind that each joint has +/- 360 degrees of rotation limit.
- Do you have good visibility of both the part and remote tool for an accurate setup?
This procedure will require visual submillimeter positioning.
- The RTCP programming movements will be a series of lines and arcs when complete.
Assumptions for our example:
- You have a reasonable understanding of UR operations.
- EOAT (End of arm tooling) is installed, configured and well suited for the task (a custom vacuum gripper shown in our example).
- The remote tool is secure and properly positioned (a bench grinder mounted flap wheel for our example).
- There is some level of compliance in the remote tooling (1-2 millimeters are helpful).
- You can pick parts with repeatable accuracy, this is critical (if the part pick location has variables, so does the part presentation to the remote tool).
Let’s get started!
- Plan as to how and in what order you will be moving your part relative to the remote tool. If you are currently performing this operation by hand, start by using these motions as a model.
- Establish your part pick up and drop off locations.
- With your part affixed to the EOAT, use the free drive mode and move your part (in order) through all your anticipated motions. This will assure that the robot reach and joint limits are not exceeded during the RTCP programming.
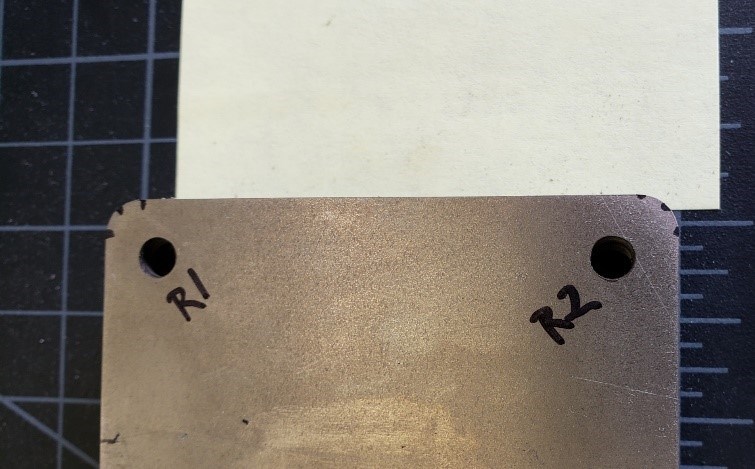
- During RTCP programming we will be entering points that ultimately create lines and arcs. It is helpful if you mark these locations marked on your part ahead of time (Figure 3).
Figure 3: marked points for programming:
- Also, during RTCP programming, you will be asked to set the remote tool position. It is helpful to mark this location ahead of time as well (Figure 4).
Figure 4: marking remote tool position:

- The UI includes a wizard to help find the center point of your remote tool. In our example, we simply measured the distances and input them. To do this, we moved the robot along a single axis relative to the base and used this line as a parallel reference for that axis. We then measured along each of the robot’s axis in its base frame and input these distances as our RTCP location. We then gave this tool center point a unique name to distinguish it from any other tool center point (in our example ‘flap_wheel’). Save your file occasionally as you progress as not to lose your work.
Let’s start the RTCP programming:
- We will focus only on the RTCP portion of the programming, so fast forward to where the part has already been picked securely and accurately.
- Under the tab Program > URCaps > Remote TCP move, select “RTCP waypoint_1”. You can rename this at any time to something best suited to your needs.
- From this same page you will see “Set Remote TCP”, from the drop-down menu select “flap_wheel” that we previously created.
- From the “Move” tab move your robot to the first of your previously rehearsed moves you tested in free drive mode.
Note: If you need a few waypoints to get your part into position without collision, add them now, otherwise your first move can be directly to your remote tool.
- Once our waypoint move is complete and we have our part at its first contact location (the beginning of our first arc), we now select CircleMove. From here we move the robot to the viapoint location and then to the endpoint location. Our first corner radius is complete.
- Next, we create a waypoint at the beginning of our second corner radius (when complete the robot will move straight from the endpoint of your first corner radius to this new waypoint).
- Now we will begin repeating the process. Again, select CircleMove and set the viapoint and endpoint. Then waypoint again and so on.
- Once you have traveled the entire perimeter of the part (as is our example), you need only to set a place or drop location.
At this point, make any changes to your waypoint names and save your file.
Operate the robot slowly when running your program for the first time.
Note: When using the “Move Here” command, your robot will not be traveling through the lines and arcs that you just create using the RCTP URCap. The system will automatically determine an optimal path for the robot to travel to the selected waypoint.
Here is a video showing the robot running the task:
The program and installation files are attached below.