Get force and torque values in tool coordinate system
These examples can be used for both e-Series and for CB3.
Examples are valid for:
CB3 Software version: 3.7.0
e-Series Software version: 5.1.0
How to achieve force and torque values in tool coordinate system
The URScript get_tcp_force()
Returns force and torque values in base coordinate system. However, force and torque values in tool coordinate system are useful in many cases. The values can be achieved by using transformation from base to tool poses.
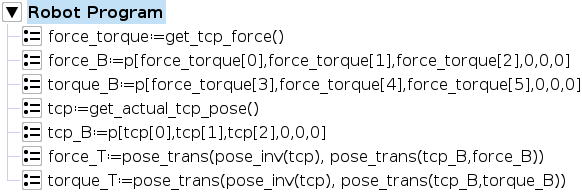
Robot Program
The force and torque values can be converted from base to tool coordinate systems by using few commands within the URP file as below. Please find attached the sample program at the bottom of the page.
URScript
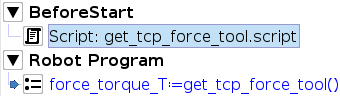
The URScript get_tcp_force_tool()
Has been made to achieve the force and torque values in tool coordinate system. As it is not an official URScript function, the script would be added before calling the function shown as below. Attached the URScript can be found at the bottom of the page.