CB3 to e-Series programs transferring quick guide
Running and transferring CB3 programs to E-series
Created Date: September 3rd, 2018
To help ensure that program behavior is as close as possible to the CB3 behavior, Polyscope will upgrade the program the first time it is loaded.
- Load program and installation on e-Series robot;
- Kinematics will be automatically updated;
- Verify the program behavior is as expected.
CHANGES TO SAFETY
- e-Series robots cannot be both controlled from the Teach Pendant and the dashboard server simultaneously.
Remote control must be enabled/disabled from the Teach Pendant.
CHANGES TO HARDWARE
In addition to the slight changes to the arm:
- Tool impedance has changed:
- Tool analog voltage input impedance has changed from 15 kΩ to 10.7 kΩ
- Tool analog current input impedance has changed from 200 Ω to 182 Ω
- IO connectors are arranged different in the Control Box, be sure to mount your IO’s correctly
- An extra connector is added for encoder quadrature signal and is dedicated to DI8 to DI11
- TP has different mounting
- Physical dimensions from CB to e-Series is slightly different. Ensure there is sufficient space for especially the robot arm
CHANGES TO PROGRAM COMPATIBILITY
- Signal frequency has increased to 500Hz which means the sync() script function only sleeps for 0.002s.
- It is recommended to use Wait program nodes or sleep(s) script commands instead;
- The returned values for the force() and get_tcp_force() script functions are different from CB3 since e-Series uses the integrated force torque sensor;
- Achieved forces are different than CB3 since e-Series uses the integrated force torque sensor.
5 CHANGES TO PROGRAMMING ROBOT MOVEMENTS
- MOVEP
- The blend algorithm for MoveP has been updated to ensure the robot correctly reaches the end waypoint.
- INSTALLATION FEATURES
- All installation features, apart from the Base and the Tool, are now variable. This means that they can be assigned in Polyscope and in script and waypoints will be updated when feature poses are modified.
- MOVE NODE
- In CB3, ”Use Tool Flange” will consistently position the output flange at the target pose ignoring the active TCP. ”Use Active TCP” is the default TCP selection in e-Series.
- WAYPOINT NODE
- As default, the internal waypoint data model has been changed to always operate in cartesian space. Polyscope will no longer ask if joint angles should be updated when loading a program on a different robot since the conversion is handled implicitly.
- VARIABLE BASE
- The base of the robot can no longer be made variable. This means programs using the base as variable will experience a change in behavior. An installation feature can be used in place of the base but will require waypoints to be re-taught.
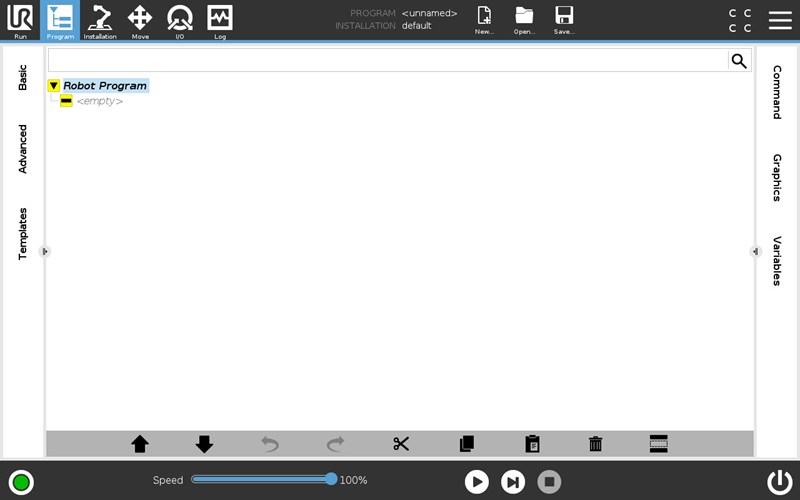
CHANGES TO SOFTWARE
The main differences between CB3 and e-Series, in terms of software, are:
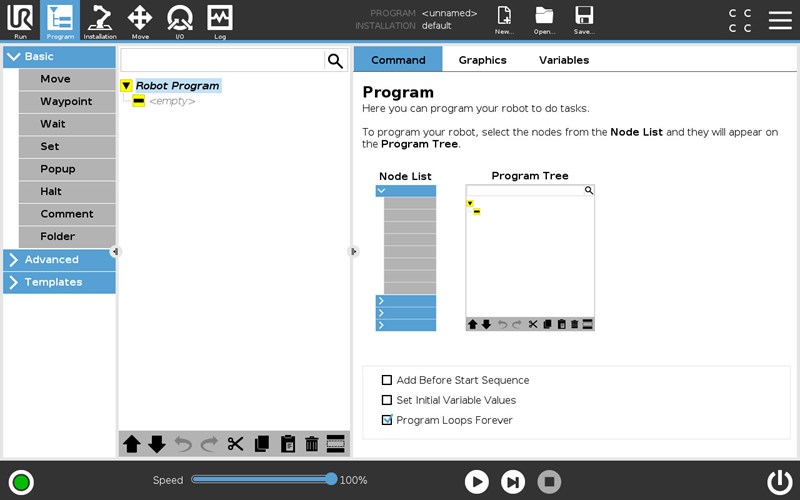
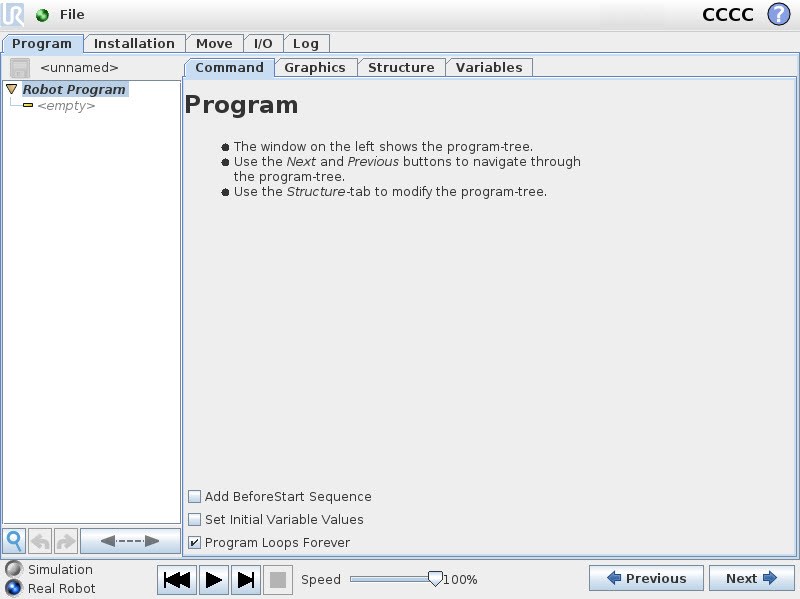
- Graphical Header for navigating all of Polyscope;
- Structure Editor, Program Tree & Command Tab available in one view.
SYSTEM PASSWORD
The password is controlled from a single point of entry in the header. If a password is set, certain tabs and areas in Polyscope are disabled and can only be accessed with the password.
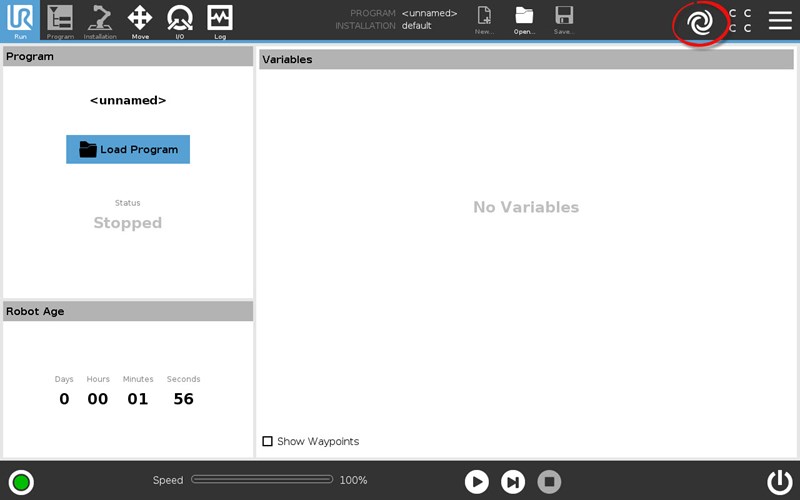
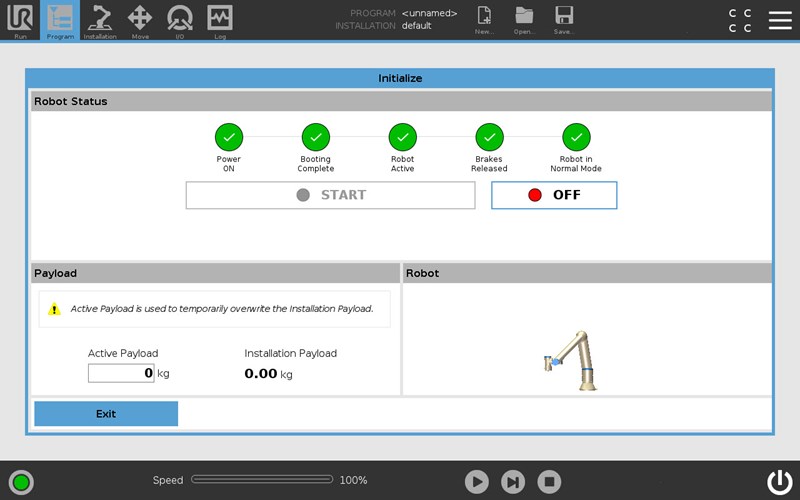
ROBOT INITIALIZATION
The Initialization icon is now in the footer and the stages the robot goes through when starting is visualized. Pressing exit will take users back to where they were in Polyscope.
PROGRAM TREE
The program tree can be fully expanded for a complete view of the program.