
DH Parameters for calculations of kinematics and dynamics
Denavit Hartenberg Parameters - DH Parameters
Denavit–Hartenberg parameters are used to calculate kinematics and dynamics of UR robots.
The definition of the Denavit–Hartenberg parameters can be found here: http://en.wikipedia.org/wiki/Denavit%E2%80%93Hartenberg_parameters
Animation to explain the Denavit–Hartenberg parameters: https://www.youtube.com/watch?v=rA9tm0gTln8
Note: UR “a” parameter = Wikipedia “r” parameter.
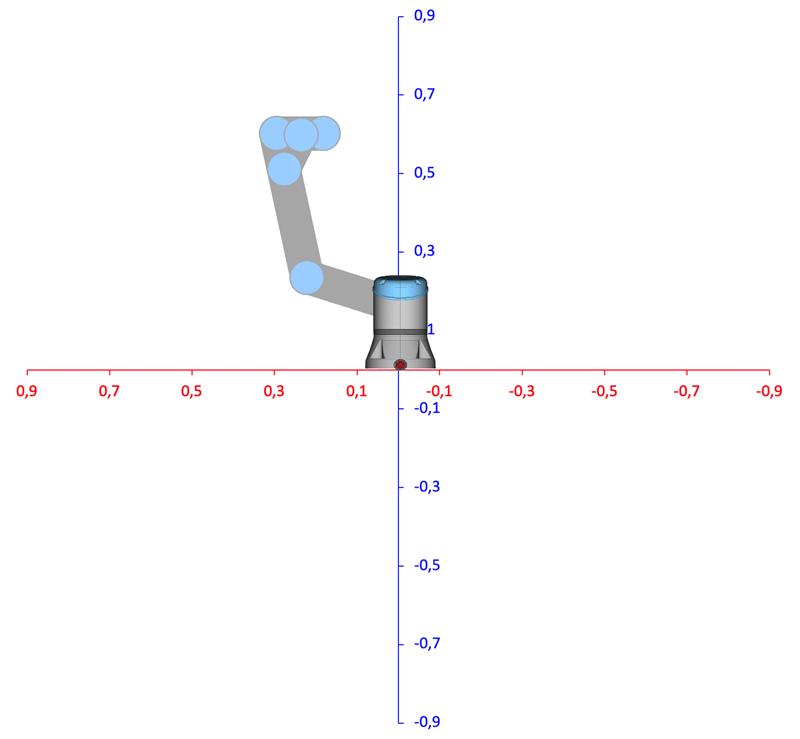
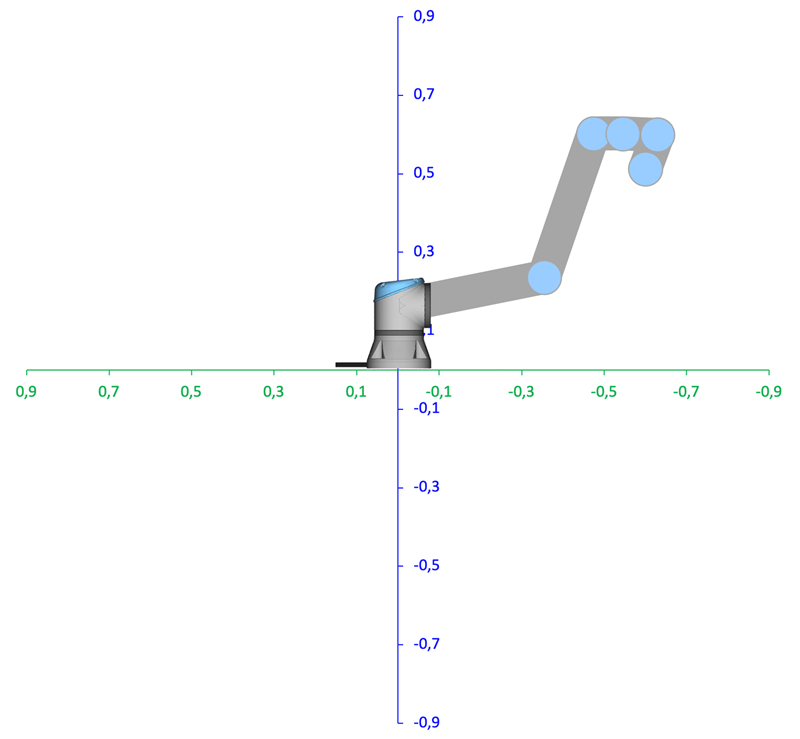
The Denavit–Hartenberg parameters in UR robots are described as the below diagrams.
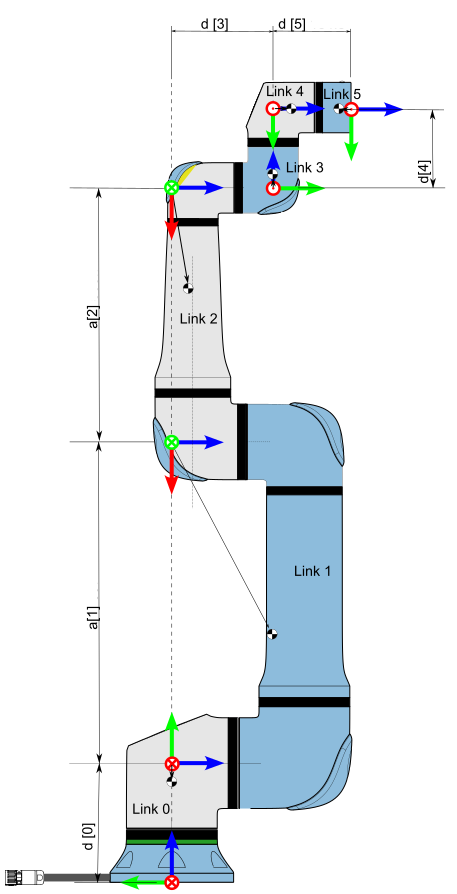
The Denavit–Hartenberg parameters of UR robots are shown as below.
It should be noted that the inertia matrix values for UR3e and UR5e are negligible due to their smaller size. The inertia starts having effect from UR10 and upwards.
For UR20 see attached file HERE.
| UR20 | ||||||||
| Kinematics | theta [rad] | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] | Inertia Matrix |
| Joint 1 | 0 | 0 | 0.2363 | π/2 | Link 0 | 16.343 | [0, -0.0610, 0.0062] | [0.0887, -0.0001, -0.0001, -0.0001, 0.0763, 0.0072, -0.0001, 0.0072, 0.0842] |
| Joint 2 | 0 | -0.8620 | 0 | 0 | Link 1 | 29.632 | [0.5226, 0, 0.2098] | [0.1467, 0.0002, -0.0516, 0.0002, 4.6659, 0.0000, -0.0516, 0.0000, 4.6348] |
| Joint 3 | 0 | -0.7287 | 0 | 0 | Link 2 | 7.879 | [0.3234, 0, 0.0604] | [0.0261, -0.0001, -0.0290, -0.0001, 0.7576, -0.0000, -0.0290, -0.0000, 0.7533] |
| Joint 4 | 0 | 0 | 0.2010 | π/2 | Link 3 | 3.054 | [0, -0.0026, 0.0393] | [0.0056, -0.0000, -0.0000, -0.0000, 0.0054, 0.0004, -0.0000, 0.0004, 0.0040] |
| Joint 5 | 0 | 0 | 0.1593 | -π/2 | Link 4 | 3.126 | [0, 0.0024, 0.0379] | [0.0059, -0.0000, 0.0000, -0.0000, 0.0058, -0.0004, 0.0000, -0.0004, 0.0043] |
| Joint 6 | 0 | 0 | 0.1543 | 0 | Link 5 | 0.846 | [0, -0.0003, -0.0318] | [0.0009, 0.0000, 0.0000, 0.0000, 0.0009, 0.0000, 0.0000, 0.0000, 0.0012] |
For UR30 see attached file HERE.
| UR30 | ||||||||
| Kinematics | theta [rad] | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] | Inertia Matrix |
| Joint 1 | 0 | 0 | 0.2363 | π/2 | Link 0 | 16.343 | [-0.0001, -0.0600, 0.0069] | [0.0883, -0.0001, -0.0001, -0.0001, 0.0764, 0.0076, -0.0001, 0.0076, 0.0830] |
| Joint 2 | 0 | -0.6370 | 0 | 0 | Link 1 | 28.542 | [0.3894, 0, 0.2103] | [0.1379, 0.0001, -0.0451, 0.0001, 2.5013, -0.0000, -0.0451, -0.0000, 2.4751] |
| Joint 3 | 0 | -0.5037 | 0 | 0 | Link 2 | 7.156 | [0.2257, 0, 0.0629] | [0.0236, 0.0000, -0.0168, 0.0009, 0.3388, 0.0001, -0.0168, 0.0001, 0.3353] |
| Joint 4 | 0 | 0 | 0.2010 | π/2 | Link 3 | 3.054 | [0, -0.0048, 0.0353] | [0.0056, 0.0000, 0.0000 0.0000, 0.0051, 0.0006 0.0000, 0.0006, 0.0043] |
| Joint 5 | 0 | 0 | 0.1593 | -π/2 | Link 4 | 3.126 | [0, 0.0046, 0.0341] | [0.0060, 0.0000, 0.0000, 0.0000, 0.0056, -0.0006, 0.0000, -0.0006, 0.0046] |
| Joint 6 | 0 | 0 | 0.1543 | 0 | Link 5 | 0.926 | [0, 0, -0.0293] | [0.0009, 0.0000, 0.0000, 0.0000, 0.0009, 0.0000, 0.0000, 0.0000, 0.0012] |
| UR3e | ||||||||
| Kinematics | theta [rad] | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] | Inertia Matrix |
| Joint 1 | 0 | 0 | 0.15185 | π/2 | Link 1 | 1.98 | [0, -0.02, 0] | 0 |
| Joint 2 | 0 | -0.24355 | 0 | 0 | Link 2 | 3.4445 | [0.13, 0, 0.1157] | 0 |
| Joint 3 | 0 | -0.2132 | 0 | 0 | Link 3 | 1.437 | [0.05, 0, 0.0238] | 0 |
| Joint 4 | 0 | 0 | 0.13105 | π/2 | Link 4 | 0.871 | [0, 0, 0.01] | 0 |
| Joint 5 | 0 | 0 | 0.08535 | -π/2 | Link 5 | 0.805 | [0, 0, 0.01] | 0 |
| Joint 6 | 0 | 0 | 0.0921 | 0 | Link 6 | 0.261 | [0, 0, -0.02] | [0, 0, 0, 0, 0, 0, 0, 0, 0.0001] |
| UR5e | ||||||||
| Kinematics | theta [rad] | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] | Inertia Matrix |
| Joint 1 | 0 | 0 | 0.1625 | π/2 | Link 1 | 3.761 | [0, -0.02561, 0.00193] | 0 |
| Joint 2 | 0 | -0.425 | 0 | 0 | Link 2 | 8.058 | [0.2125, 0, 0.11336] | 0 |
| Joint 3 | 0 | -0.3922 | 0 | 0 | Link 3 | 2.846 | [0.15, 0.0, 0.0265] | 0 |
| Joint 4 | 0 | 0 | 0.1333 | π/2 | Link 4 | 1.37 | [0, -0.0018, 0.01634] | 0 |
| Joint 5 | 0 | 0 | 0.0997 | -π/2 | Link 5 | 1.3 | [0, 0.0018,0.01634] | 0 |
| Joint 6 | 0 | 0 | 0.0996 | 0 | Link 6 | 0.365 | [0, 0, -0.001159] | [0, 0, 0, 0, 0, 0, 0, 0, 0.0002] |
| UR10e | ||||||||
| Kinematics | theta [rad] | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] | Inertia Matrix |
| Joint 1 | 0 | 0 | 0.1807 | π/2 | Link 1 | 7.369 | [0.021, 0.000, 0.027] | [0.0341, 0.0000, -0.0043, 0.0000, 0.0353, 0.0001, -0.0043, 0.0001, 0.0216] |
| Joint 2 | 0 | -0.6127 | 0 | 0 | Link 2 | 13.051 | [0.38, 0.000, 0.158] | [0.0281, 0.0001, -0.0156, 0.0001, 0.7707, 0.0000, -0.0156, 0.0000, 0.7694] |
| Joint 3 | 0 | -0.57155 | 0 | 0 | Link 3 | 3.989 | [0.24, 0.000, 0.068] | [0.0101, 0.0001, 0.0092, 0.0001, 0.3093, 0.0000, 0.0092, 0.0000, 0.3065] |
| Joint 4 | 0 | 0 | 0.17415 | π/2 | Link 4 | 2.1 | [0.000, 0.007, 0.018] | [0.0030, -0.0000, -0.0000, -0.0000, 0.0022, -0.0002, -0.0000, -0.0002, 0.0026] |
| Joint 5 | 0 | 0 | 0.11985 | -π/2 | Link 5 | 1.98 | [0.000, 0.007, 0.018] | [0.0030, -0.0000, -0.0000, -0.0000, 0.0022, -0.0002, -0.0000, -0.0002, 0.0026] |
| Joint 6 | 0 | 0 | 0.11655 | 0 | Link 6 | 0.615 | [0, 0, -0.026] | [0.0000, 0.0000, -0.0000, 0.0000, 0.0004, 0.0000, -0.0000, 0.0000, 0.0003] |
| UR16e | ||||||||
| Kinematics | theta [rad] | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] | Inertia Matrix |
| Joint 1 | 0 | 0 | 0.1807 | π/2 | Link 1 | 7.369 | [0.000, -0.016, 0.030] | [0.0335, 0.0000, -0.0000, 0.0000, 0.0337, 0.0037, -0.0000, 0.0037, 0.0210] |
| Joint 2 | 0 | -0.4784 | 0 | 0 | Link 2 | 10.450 | [0.302, 0.000, 0.160] | [0.0280, -0.0001, -0.0072, -0.0001, 0.4756, 0.0000, -0.0072, -0.0000, 0.4764] |
| Joint 3 | 0 | -0.36 | 0 | 0 | Link 3 | 4.321 | [0.194, 0.000, 0.065] | [0.0109, 0.0001, 0.0101, 0.0001, 0.1206, 0.0000, 0.0101, 0.0000, 0.11714] |
| Joint 4 | 0 | 0 | 0.17415 | π/2 | Link 4 | 2.180 | [0.000, -0.009, 0.011] | [0.0061, -0.0000, -0.0000, -0.0000, 0.0025, 0.0008, 0.0000, 0.0008, 0.0058] |
| Joint 5 | 0 | 0 | 0.11985 | -π/2 | Link 5 | 2.033 | [0.000, 0.018, 0.012] | [0.0039, -0.0000, 0.0000, -0.0000, 0.0022, -0.0005, 0.0000, -0.0005, 0.0036] |
| Joint 6 | 0 | 0 | 0.11655 | 0 | Link 6 | 0.907 | [0, 0, -0.044] | [0.0012, 0.0000, 0.0000, 0.0000, 0.0012, 0.0000, 0.0000, 0.0000, 0.0008] |
| UR3 | |||||||
| Kinematics | theta [rad] | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] |
| Joint 1 | 0 | 0 | 0.1519 | π/2 | Link 1 | 2 | [0, -0.02, 0] |
| Joint 2 | 0 | -0.24365 | 0 | 0 | Link 2 | 3.42 | [0.13, 0, 0.1157] |
| Joint 3 | 0 | -0.21325 | 0 | 0 | Link 3 | 1.26 | [0.05, 0, 0.0238] |
| Joint 4 | 0 | 0 | 0.11235 | π/2 | Link 4 | 0.8 | [0, 0, 0.01] |
| Joint 5 | 0 | 0 | 0.08535 | -π/2 | Link 5 | 0.8 | [0, 0, 0.01] |
| Joint 6 | 0 | 0 | 0.0819 | 0 | Link 6 | 0.35 | [0, 0, -0.02] |
| UR5 | |||||||
| Kinematics | theta [rad] | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] |
| Joint 1 | 0 | 0 | 0.089159 | π/2 | Link 1 | 3.7 | [0, -0.02561, 0.00193] |
| Joint 2 | 0 | -0.425 | 0 | 0 | Link 2 | 8.393 | [0.2125, 0, 0.11336] |
| Joint 3 | 0 | -0.39225 | 0 | 0 | Link 3 | 2.33 | [0.15, 0.0, 0.0265] |
| Joint 4 | 0 | 0 | 0.10915 | π/2 | Link 4 | 1.219 | [0, -0.0018, 0.01634] |
| Joint 5 | 0 | 0 | 0.09465 | -π/2 | Link 5 | 1.219 | [0, 0.0018,0.01634] |
| Joint 6 | 0 | 0 | 0.0823 | 0 | Link 6 | 0.1879 | [0, 0, -0.001159] |
| UR10 | |||||||
| Kinematics | theta [rad] | a [m] | d [m] | alpha [rad] | Dynamics | Mass [kg] | Center of Mass [m] |
| Joint 1 | 0 | 0 | 0.1273 | π/2 | Link 1 | 7.1 | [0.021, 0.000, 0.027] |
| Joint 2 | 0 | -0.612 | 0 | 0 | Link 2 | 12.7 | [0.38, 0.000, 0.158] |
| Joint 3 | 0 | -0.5723 | 0 | 0 | Link 3 | 4.27 | [0.24, 0.000, 0.068] |
| Joint 4 | 0 | 0 | 0.163941 | π/2 | Link 4 | 2 | [0.000, 0.007, 0.018] |
| Joint 5 | 0 | 0 | 0.1157 | -π/2 | Link 5 | 2 | [0.000, 0.007, 0.018] |
| Joint 6 | 0 | 0 | 0.0922 | 0 | Link 6 | 0.365 | [0, 0, -0.026] |
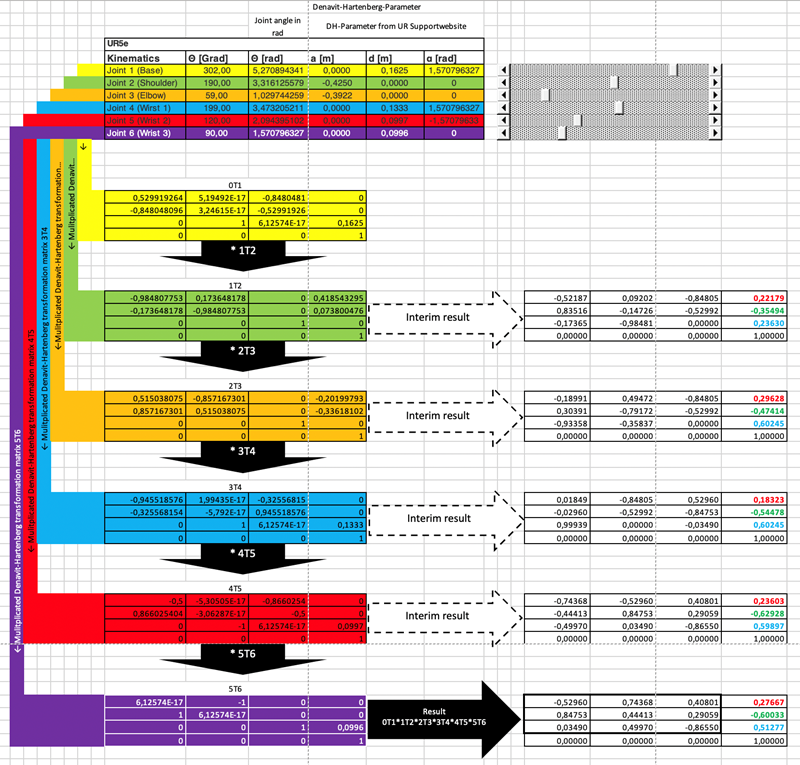
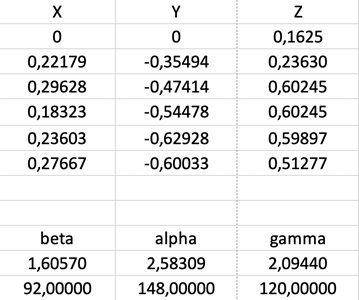
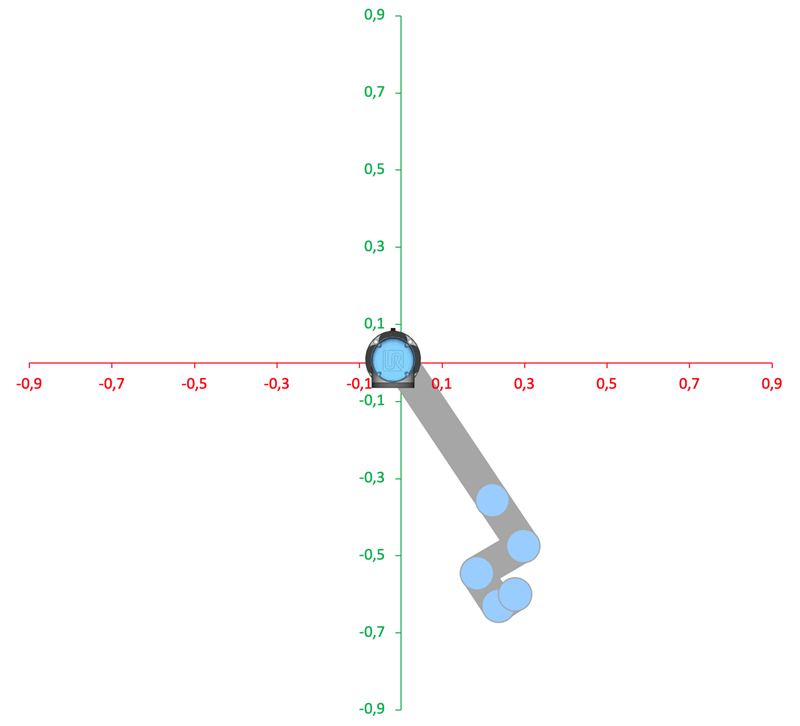
Download the excel file below for an overview and understanding how the transformation is done in regards to the position of the robot's joints.